Se connecter dans KranOS avec
l'utilisateur « Abnahme » (réception) (niveau d'utilisateur [2]‚).
Voir « Connecter un
ordinateur portable ou une tablette à ABUControl ».
Se connecter dans KranOS avec
l'utilisateur « Abnahme » (réception) (niveau d'utilisateur [2]‚).
Voir « Connecter un
ordinateur portable ou une tablette à ABUControl ».L'automate programmable est l'unité centrale de stockage et de calcul. Il est intégré dans la commande du chariot de direction. Si le pont a plusieurs chariots de direction, l'automate programmable´du chariot de direction 1 est l'unité centrale de stockage et de calcul.
Un automate programmable défectueux peut être démonté et remplacé en tant que module individuel.
La programmation de l'automate programmable se compose de deux parties :
─ Le firmware ABUS (logiciel d'exploitation de base) est sauvegardé de manière fixe dans l'automate programmable.
─ L'application (logiciel de pont ABUS), la configuration client (réglages individuels du système de ponts) ainsi que KranOS sont sauvegardés sur une carte SD.
Pour le remplacement, uniquement un automate programmable équipé du firmware ABUS peut être utilisé. Les applications et la configuration client sont transmises à l'aide de la carte SD.
Si les automates programmables du chariot de direction 2 et du chariot de direction 3 doivent être remplacés ensemble, il faut d'abord démonter l'automate programmable défectueux du chariot de direction 2, installer le nouvel automate programmable et transmettre l'application et la configuration via l'automate programmable du chariot de direction 1. Ensuite, l'automate programmable du chariot de direction 3 peut être démonté, le nouvel automate programmable peut être installé et l'application et la configuration peuvent être transférées.
L'automate programmable du chariot de direction 2 et du chariot de direction 3 contiennent également une carte SD ; cependant, celle-ci cne contient que quelques données de base. Durant le remplacement, il n'est pas nécessaire de s'occuper des cartes SD des chariots de direction 2 et 3.
Pour cette étape de travail, un accès à KranOS via un ordinateur portable ou une tablette est requis. L'utilisateur « Abnahme » (réception) (niveau d'utilisateur [2]‚) doit être connecté.
Avant de démonter l'automate programmable défectueux, les heures de pleine charge doivent être lues dans la mémoire des états de sollicitation théorique.
|
Aperçu : navigation dans KranOS |
|
Utilisateur « Abnahme » (réception) à « Mécanisme de levage » à « Étalonnage du mécanisme de levage » |
Se connecter dans KranOS avec
l'utilisateur « Abnahme » (réception) (niveau d'utilisateur [2]‚).
Voir « Connecter un
ordinateur portable ou une tablette à ABUControl ».
 Dans le menu principal,
sélectionner le mécanisme de levage souhaité (par exemple le mécanisme de
levage 1).
Dans le menu principal,
sélectionner le mécanisme de levage souhaité (par exemple le mécanisme de
levage 1).
● La fenêtre du mécanisme de levage souhaité apparaît.
Dans le menu
« Réglages » (roue dentée sur fond jaune), cliquer sur l'option de
menu « Étalonnage du mécanisme de levage ».
|
| |
|
Zone de texte « Valeur d'utilisation » |
|
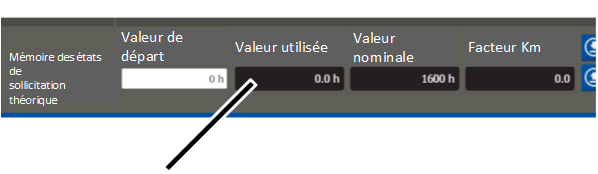
● La fenêtre « Étalonnage du mécanisme de levage » apparaît.
Dans la ligne « Mémoire des
états de sollicitation théorique », noter la valeur de la zone de texte
« Valeur utilisée ».
Désactiver le pont. Voir
« Désactiver le
pont »,.
Retirer la carte SD de
l'automate programmable défectueux.
Débrancher ou séparer les câbles
de connexion de l'automate programmable défectueux.
Démonter l'automate programmable
défectueux.
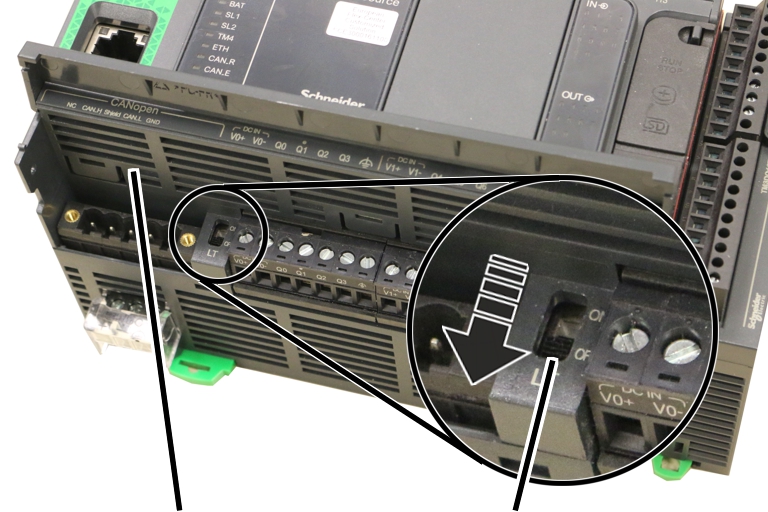
Sur le nouvel automate programmable :
D'une manière générale, la résistance de terminaison de l'automate programmable doit être désactivée.
|
| |
|
Automate programmable |
Interrupteur de la résistance de terminaison |
Mettre l'interrupteur de la
résistance de terminaison du nouvel automate programmable sur
« off ».
Pour plus de détails sur la résistance de terminaison : voir « Intégrer la résistance de terminaison dans le réseau de bus CAN »,.
Installer l'automate
programmable.
Rebrancher ou remettre en place
les câbles de connexion.
Introduire la carte SD dans le
nouvel automate programmable.
Activer le pont.
● Automate programmable du chariot de direction 1 : l'automate programmable reconnaît l'application et la configuration sur la carte SD et transmet les données de la carte SD.
Automate programmable du chariot de direction 2 ou du chariot de direction 3 : l'automate programmable du chariot de direction 1 trouve le nouvel automate programmable du chariot de direction 2 ou 3 dans le réseau de bus CAN et transmet l'application et la configuration. Il n'est pas nécessaire de s'occuper des cartes SD des chariots de direction 2 et 3.
Pour plus de détails sur la sauvegarde et la restauration de données : « Sauvegarde de données et restauration de la configuration client ‚[2] ».
Après le montage, les heures de pleine charge doivent être transférées en tant que nouvelle valeur de départ de la mémoire des états de sollicitation théorique.
|
Aperçu : navigation dans KranOS |
|
Utilisateur « Abnahme » (réception) à « Mécanisme de levage » à « Étalonnage du mécanisme de levage » |
Se connecter dans KranOS avec
l'utilisateur « Abnahme » (réception) (niveau d'utilisateur [2]‚).
Voir « Connecter un
ordinateur portable ou une tablette à ABUControl ».
Dans le menu principal,
sélectionner le mécanisme de levage souhaité (par exemple le mécanisme de
levage 1).
● La fenêtre du mécanisme de levage souhaité apparaît.
Dans le menu
« Réglages » (roue dentée sur fond jaune), cliquer sur l'option de
menu « Étalonnage du mécanisme de levage ».
|
| |
|
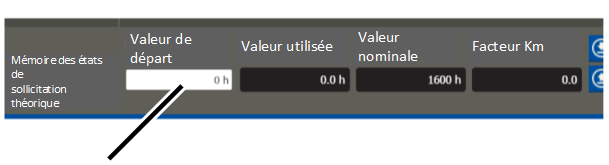
Champ de saisie « Valeur de départ » |
|
● La fenêtre « Étalonnage du mécanisme de levage » apparaît.
Dans la ligne « Mémoire des
états de sollicitation théorique », noter la valeur notée préalablement
(voir « Lire la mémoire des
états de sollicitation théorique ») dans le champ de saisie
« Valeur de départ ».
Cliquer sur le bouton
« Écrire sur l'AP ».