Se connecter à KranOS avec
l'utilisateur « Service » (niveau d'utilisateur [1]‚) ou
« Abnahme » (réception) (niveau d'utilisateur [2]). Voir « Connecter un
ordinateur portable ou une tablette à ABUControl ».
Se connecter à KranOS avec
l'utilisateur « Service » (niveau d'utilisateur [1]‚) ou
« Abnahme » (réception) (niveau d'utilisateur [2]). Voir « Connecter un
ordinateur portable ou une tablette à ABUControl ».Dans KranOS, des informations sur l'état actuel de tous les axes de mouvement du pont (translation du pont, translation du chariot de direction, mécanisme de levage) peuvent être affichées.
Dans la fenêtre, le système affiche uniquement les composants qui sont en effet disponibles sur le pont en question.
Pour cette étape de travail, un accès à KranOS via un ordinateur portable ou une tablette est requis. L'utilisateur « Abnahme » (réception) (niveau d'utilisateur ‚[2]) ou « Service » (niveau d'utilisateur [1]) doit être connecté.
|
Aperçu : navigation dans KranOS |
|
Utilisateur « Service » ou « Abnahme » (réception) à « Translation du pont » |
|
Utilisateur « Service » ou « Abnahme » (réception) à « Translation de chariot » |
|
Utilisateur « Service » ou « Abnahme » (réception) à « Mécanisme de levage » |
Se connecter à KranOS avec
l'utilisateur « Service » (niveau d'utilisateur [1]‚) ou
« Abnahme » (réception) (niveau d'utilisateur [2]). Voir « Connecter un
ordinateur portable ou une tablette à ABUControl ».
 Dans le menu principal,
sélectionner l'axe de mouvement du pont souhaité (par exemple translation du
pont).
Dans le menu principal,
sélectionner l'axe de mouvement du pont souhaité (par exemple translation du
pont).
● La fenêtre de l'axe de mouvement du pont correspondant apparaît.
Les fenêtres varient en fonction de l'axe de mouvement du pont.
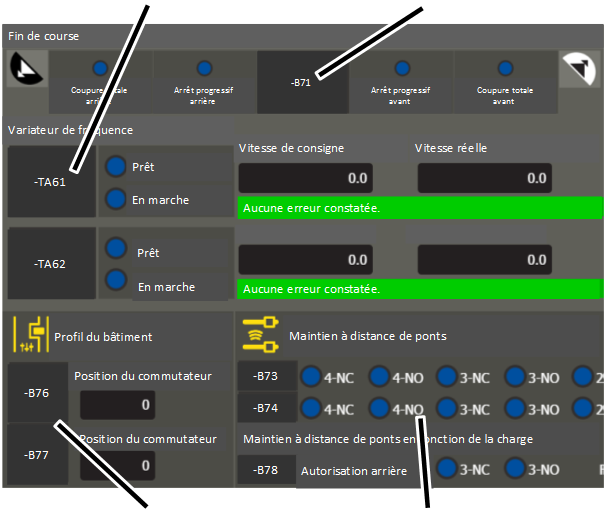
Translation du pont :
|
Variateur de fréquence pour la translation du pont -TA61 et -TA62 |
Fin de course du pont –B71 |
|
| |
|
Profil du bâtiment |
Maintien à distance de ponts |
─ Variateur de fréquence pour la translation du pont (-TA61 et -TA62) : indique l'état du variateur de fréquence pour translation du pont.
« Prêt » : le variateur de fréquence est opérationnel.
« En marche » : le variateur de fréquence est actif et le mécanisme d'entraînement tourne.
« Aucune erreur constatée » ou affichage d'un message.
« Vitesse de consigne » : vitesse à laquelle le mécanisme d'entraînement doit tourner.
« Vitesse réelle » : vitesse à laquelle le mécanisme d'entraînement tourne.
Sur les ponts sans guidage électronique, les deux motoréducteurs de pont utilisent un seul variateur de fréquence (-TA61). Dans le cas d'un guidage électronique ou d'un entraînement du pont à 4 galets, un variateur de fréquence supplémentaire -TA62 est affiché.
─ Fin de course du pont (-B71 ) : indique la position de commutateur de la fin de course du pont.
Sur fond vert : le fin de course translation n'est pas
engagé
Sur fond bleu : le fin de course translation est engagé.
Les fins de course du pont sont utilisée pour l'arrêt progressif et la coupure totale. En direction de l'extrémité du pont de roulement, des interrupteurs à levier en croix (-B71) sont utilisés ; en direction d'un pont duplex, des cellules photoélectriques à réflexion (-B711 et -B712 ainsi que -B713 et -B714 à la place de -B71) sont utilisées.
─ Interrupteurs à levier en croix pour commande de profil du bâtiment (-B76 / -B77) : indique la position de commutateur actuelle des interrupteurs à levier en croix utilisés pour la commande de profil de bâtiment. En combinant les deux interrupteurs à levier en croix avec 6 états d'enclenchement chacun, on peut détecter jusqu'à 36 positions.
─ Cellules photoélectriques à réflexion pour maintien à distance de ponts (-B73) : indique les états d'enclenchement des cellules photoélectriques à reflexion du système de maintien à distance de ponts.
Si le maintien à distance de ponts est utilisé, le pont ralentit à la vitesse de déplacement lente (arrêt progressif) ou s'arrête complètement (coupure totale) dès qu'il s'approche d'un pont duplex au-delà d'une distance réglée.
Une cellule photoélectrique à réflexion est utilisée pour chaque point de commutation et chaque sens de marche. ABUControl surveille simultanément le contact d'ouverture (NC) et le contact de fermeture (NO) de toutes les cellules photoélectriques à reflexion.
Le contact 1 est utilisé pour la coupure totale en marche avant, le contact 2 pour l'arrêt progressif en marche avant, le contact 3 pour l'arrêt progressif en marche arrière et le contact 4 pour la coupure totale en marche arrière.
Le maintien à distance de ponts est souvent utilisé pour éviter que les ponts ne s'approchent au-delà d'une certaine distance, par exemple pour des raisons statiques. Le maintien à distance de ponts peut également être utilisé conjointement avec la sécurité anti-collision (voir fin de course du pont -B71).
─ Cellules photoélectriques à réflexion supplémentaires pour le maintien à distance de ponts (-B74) : en plus de l'élément -B73, chaque cellule photoélectrique à réflexion peut être doublement connectée pour chaque point de commutation et chaque sens de marche afin d'améliorer la sécurité du système.
─ Cellule photoélectrique de transmission de signaux pour le maintien à distance de ponts dépendant de la charge (-B78) :
Si le maintien à distance de ponts est réalisé de manière dépendante de la charge, le pont ralentit et s'arrête lorsqu'il s'approche d'un pont duplex au-delà d'une distance réglée et qu'une charge supérieure à la valeur réglée est transportée en même temps.
Pour assurer que les deux commandes dans le pont et dans le pont duplex savent si les limites de charge réglées sur l'autre pont sont dépassées, ces informations sont transmises d'un pont à l'autre à l'aide d'une cellule photoélectrique. Chaque pont possède une cellule photoélectrique d'émission du signals d'autorisation et une cellule de réception.
Ici, le système indique quel signal est présent sur le récepteur. La zone 1 indique le signal d'autorisation en marche avant. La zone 3 indique le signal d'autorisation en marche arrière.
NC sur fond bleu, NO sur fond vert : la valeur est
inférieure à la charge réglée. Le pont reçoit un signal d'autorisation de la
part du pont duplex.
NC sur fond vert, NO sur fond bleu : la valeur
réglée est dépassée. Le pont reçoit aucn signal d'autorisation de la part du
pont duplex.
La charge peut être réglée dans les paramètres étendus. Voir « Régler les paramètres étendus des profils de translation (profil de translation du pont, profil de translation du chariot de direction) ‚[2] ».
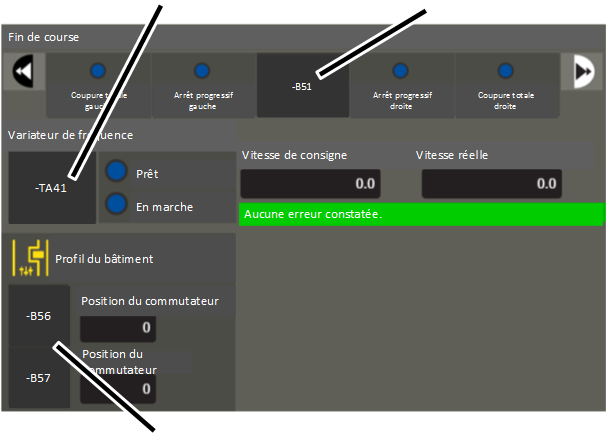
Translation du chariot de direction :
|
Variateur de fréquence pour la translation du chariot de direction -TA41 |
Fin de course du chariot de direction –B51 |
|
| |
|
Profil du bâtiment |
|
─ Variateur de fréquence pour translation du chariot de direction (-TA41) : indique l'état du variateur de fréquence pour la translation du chariot de direction.
« Prêt » : le variateur de fréquence est opérationnel.
« En marche » : le variateur de fréquence est actif et le mécanisme d'entraînement tourne.
« Aucune erreur constatée » ou affichage d'un message.
« Vitesse de consigne » : vitesse à laquelle le mécanisme d'entraînement doit tourner.
« Vitesse réelle » : vitesse à laquelle le mécanisme d'entraînement tourne.
─ Fin de course du chariot de direction(-B51) : indique la position de commutateur des fins de course du chariot de direction.
Sur fond vert : le fin de course translation n'est pas
engagé
Sur fond bleu : le fin de course translation est engagé.
─ Interrupteurs à levier en croix pour commande de profil du bâtiment (-B56 / -B57) : indique la position de commutateur actuelle des interrupteurs à levier en croix utilisés pour la commande de profil de bâtiment. En combinant les deux interrupteurs à levier en croix avec 6 états d'enclenchement chacun, on peut détecter jusqu'à 36 positions.
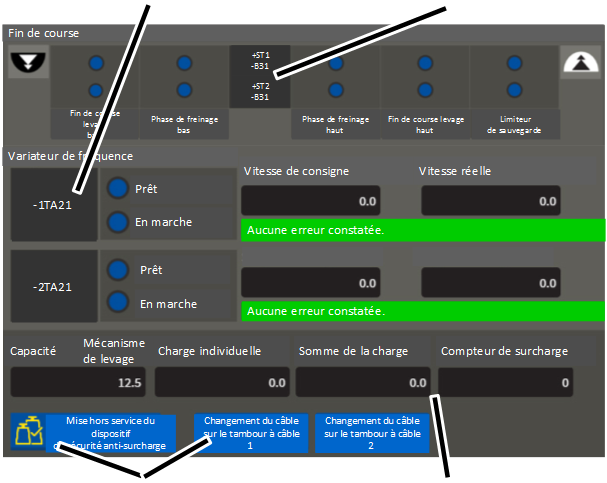
Mécanisme de levage :
|
Variateurs de fréquence du mécanisme de levage -1TA21 et -2TA21 |
Fins de course de levage -B31 et -B32 |
|
| |
|
Boutons |
Affichage de la charge |
─ Variateur de fréquence du mécanisme de levage (-1TA21) : indique l'état du variateur de fréquence du mécanisme de levage.
« Prêt » : le variateur de fréquence est opérationnel.
« En marche » : le variateur de fréquence est actif et le mécanisme d'entraînement tourne.
« Aucune erreur constatée » ou affichage d'un message.
« Vitesse de consigne » : vitesse à laquelle le mécanisme d'entraînement doit tourner.
« Vitesse réelle » : vitesse à laquelle le mécanisme d'entraînement tourne.
En cas d'un double mécanisme de levage, un variateur de fréquence supplémentaire -2TA21 est affiché pour le deuxième tambour à câble.
─ Fin de course de levage (-B31) : indique la position de contacteur de la fin de course de levage.
Sur fond vert : le fin de course de levage n'est pas
engagé
Sur fond bleu : le fin de course de levage est engagé.
En cas d'un double mécanisme de levage, une fin de course de levage supplémentaire -B32 est utilisée pour le deuxième tambour à câble.
─ Boutons : permettent d'activer des fonctions pour des travaux d'entretien :
« Mise hors service du dispositif de sécurité anti-surcharge » : voir « Contourner le limiteur de charge ».
« Changement du câble sur le tambour à câble » : voir « Remplacer le câble »,.
─ Affichage de la charge : indique les résultats de mesure du système de mesure de charge :
« Capacité » : capacité maximale du mécanisme de levage
« Charge individuelle » : charge mesurée actuellement au niveau du mécanisme de levage
« Somme de la charge » : somme de la charge de tous les mécanismes de levage ou de tous les ponts
Compteur de surcharge : nombre de mouvements de levage avec surcharge. Le nombre est augmenté de 1 lorsque le mécanisme de levage lève une charge dépassant la capacité maximale du pont.