Disassemble the faulty gear
limit switch.
Disassemble the faulty gear
limit switch.The absolute rotary encoder is mounted on the gear limit switch and determines the exact position of the cable drum, and then reports this to the PLC.
After replacing the entire unit, the new absolute rotary encoder must be automatically or manually addressed and referenced.
The ABUS gear limit switch "GGS" with absolute rotary encoder "AWG" is fully compatible with the "GPK" hoist limit switches with "Kübler" absolute rotary encoders. If necessary, a "GPK" hoist limit switch can however be installed with a "Kübler" absolute rotary encoder.
Disassemble the faulty gear
limit switch.
Install new gear limit switch.
See product manual "ABUS gear limit switch with absolute rotary encoder", section "Installing and connecting gear limit switch“.
Reset switching points for the
bottom hoist limiter, the top hoist limiter and the backup limiter.
See Setting switching points for backup limiter and top hoist limiter.
See Setting switching point for the bottom hoist limiter.
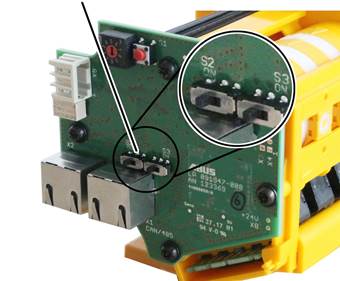
In most cases, the terminating resistor must be switched off on the absolute rotary encoder. In special cases, the terminating resistor may need to be switched on.
|
Sliding switch for terminating resistor |
|
|
| |
Check whether the terminating
resistor on the faulty absolute rotary encoder was switched on (both sliding
switches toward outside to ON) or switched off (both sliding switches toward
inside).
If a "GPK" hoist limit switch was previously installed with a "Kübler" absolute rotary encoder: The terminating resistor was switched off.
Switch the terminating resistor
on the new absolute rotary encoder as it was on the faulty absolute rotary
encoder (switch on or switch off).
In most cases, the absolute rotary encoder requires no terminating resistance. In special cases however, terminating resistance may need to be present.
Since no terminating resistor can be switched on directly on the "Kübler" absolute rotary encoder, a CAN distributor can be installed in the hoist limit switch housing. The terminating resistor can be switched on at the CAN distributor.
For further details about the terminating resistor: See Setting the terminating resistor in the CAN bus network.
The absolute rotary encoder is controlled by the central PLC via a device address. The device address is automatically set.
The device address is a digital unique address of each CAN bus device in the CAN bus network, via which the PLC and the respective CAN bus device exchange data. Each CAN bus device must have its own unique device address. If two CAN bus devices inadvertently have the same device address there will be a conflict and a fault is displayed.
The bit rate is the speed with which the data is exchanged.
Setting the device address automatically:
If the base address is set on the absolute rotary encoder, the correct device address is automatically set by the PLC. See also Overview: Device addresses.
The PLC doesn't find a component
at the expected device address, instead it finds a CAN bus device with a base
address.
● The PLC converts the base address of the CAN bus device to the expected device address.
Setting device address manually:
The device address of the absolute rotary encoder can be manually set in KranOS.
For this work step, access from a laptop or tablet computer to KranOS is necessary. The user "Abnahme" (commissioning) (user level ‚[2]) or "Service" (user level [1]) must be logged in.
|
Overview: Navigation in KranOS |
|
User "Service" or "Abnahme" (commissioning) à "Hoist" à "Absolute rotary encoder" |
 Log in to KranOS with user "Service" (user level [1]) or "Abnahme"
(commissioning) (user level [2]). See Connecting laptop or
tablet computer with ABUControl.
Log in to KranOS with user "Service" (user level [1]) or "Abnahme"
(commissioning) (user level [2]). See Connecting laptop or
tablet computer with ABUControl.
Select the desired hoist (e.g. Hoist 1) in the main menu.
● The window for the requested hoist appears.
Click on the "Absolute rotary encoder" menu item in the "Settings"
menu (gear wheel on yellow background).
|
"Actual value" input field |
"Target value" input field | |
|
| ||
|
"Set device address" button |
"Reset error" button | |
● The "Absolute rotary encoder" window appears.
If necessary: Reset a message from the absolute rotary encoder with
the "Reset error" button.
● Input the device address from the absolute rotary encoder that is to be changed in the "Actual value" input field.
The absolute rotary encoders have the base address 70 and device addresses from 71 to 76.
If necessary, the device address 63 can be input with the "Load device address 63" button. This can be necessary for older absolute rotary encoders
Enter the desired new device address in the "Target value" input
field.
─ Only device addresses from address range 70 can be assigned for the absolute rotary encoder.
Click on the "Set device address" button.
● The set device address is saved.
The absolute rotary encoder has to be referenced after it is replaced. This referencing is not part of setting the switching points for the gear limit switch, nor is it part of calibrating the load measuring system, but is instead important for internal calculations (e.g. sway control and discard prognosis). If the absolute rotary encoder is not correctly referenced, malfunctions of the sway control or incorrect calculations in the discard prognosis could occur.
The three switching points of the gear limit switch should already be correctly set before the absolute rotary encoder is referenced.
Measuring reference position:
|
| |
|
Reference position |
|
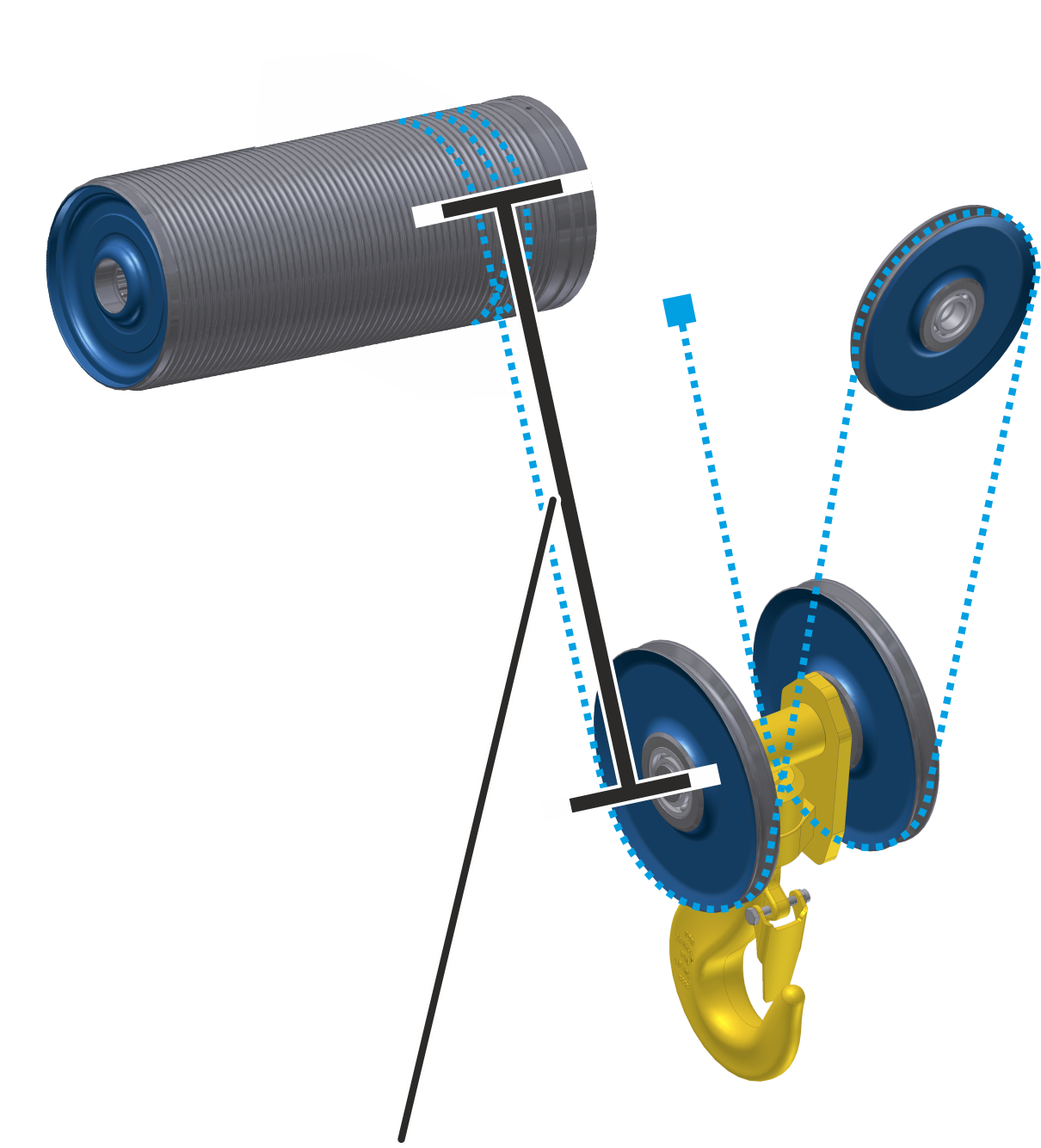
Move the load hook to a hook position in which the reference position
can be easily measured (e.g. about 1.5 m under the highest hook
position).
Measure the distance from the centre of the cable drum to the centre
of the deflection roller of the bottom block.
Setting the reference point:
|
Overview: Navigation in KranOS |
|
User "Service" or "Abnahme" (commissioning) à "Hoist" à "Absolute rotary encoder" |
Log in to KranOS with user "Service" (user level [1]) or "Abnahme"
(commissioning) (user level [2]). See Connecting laptop or
tablet computer with ABUControl.
Select the desired hoist (e.g. Hoist 1) in the main menu.
● The window for the requested hoist appears.
Click on the "Absolute rotary encoder" menu item in the "Settings"
menu (gear wheel on yellow background).
|
|
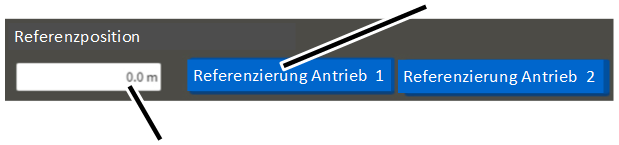
"Drive 1 referencing" button |
|
| |
|
"Reference position" input field |
|
● The "Absolute rotary encoder" window appears.
● Enter the value you measured in the "Reference position" input field.
Click on the button for the desired drive (e.g. "Drive 1
referencing").
|
| |
|
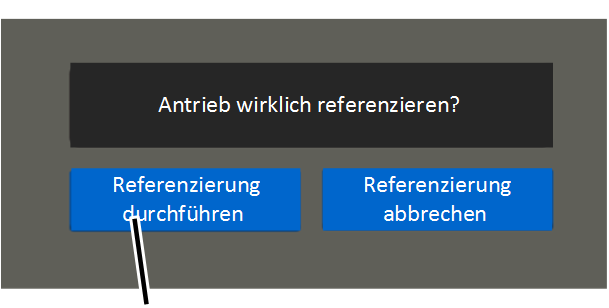
"Perform referencing" button |
|
● A confirmation prompt appears.
 Click on the "Perform referencing" button.
Click on the "Perform referencing" button.
● Save the input value.