Le pont est équipé de deux chariots de direction. Il est
possible de les commander avec une boîte à boutons commune (ou un émetteur).
Cela permet d'améliorer la sécurité lors du transport par ex. de charges longues
ou volumineuses.
Affectation des
chariots de direction
Uniquement avec système
électrique 3 ABUS à LED à matrice de points
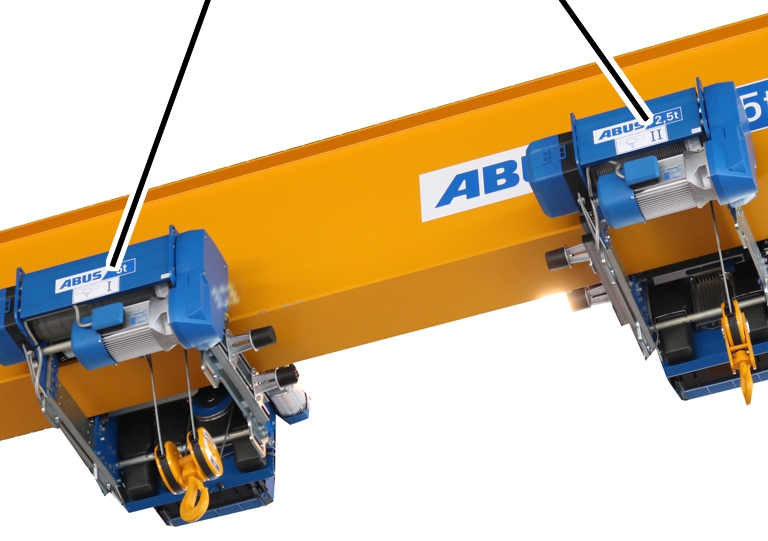
L'afficheur LED à matrice de points peut afficher en plus les
chiffres « 1 » et « 2 » sur un chariot de direction pour
indiquer leur affectation.
|

|
|
Numéro
du chariot de direction |
|
● Le numéro
de réglage du chariot de direction est affiché sur la position la plus à l'avant
de l'afficheur LED à matrice de points.
|
Inscription
« Chariot de direction I » |
Inscription
« Chariot de direction
II » |
|
|
● Les
chariots de direction portent les inscriptions « Chariot I » et
« Chariot II » sur le treuil à câble.
Commutation
entre chariot de direction I et chariot de direction II
Dans le cas d’un pont avec choix du chariot de direction, il
est possible de commuter entre chariot I et chariot II.
Uniquement avec
ABURemote
Voir le manuel du produit ABURemote.
Uniquement avec boîte à
boutons
Voir le manuel du produit boîte à boutons.
Commuter sur le
fonctionnement commun
Dans le cas d’un pont avec choix du chariot de direction et
fonctionnement commun, il est possible de commuter sur fonctionnement commun des
deux chariots de direction, en plus de la commutation entre chariot de
direction I et chariot de direction II.
Uniquement avec
ABURemote
Voir le manuel du produit ABURemote.
Uniquement avec boîte à
boutons
Voir le manuel du produit boîte à boutons.
Uniquement avec système
électrique 3 ABUS
La commande dispose d’une synchronisation. Il est possible
que la distance entre les deux chariots de direction ou que la position de la
charge change pendant le transport, par exemple en raison de différences de
sollicitation des mécanismes d’entraînement en cas de répartition différente de
la charge, en raison de différences des courses de freinage et en raison des
tolérances des composants.
Si la distance des chariots de direction ou la position de la
charge change :
 Immobiliser entièrement le
pont.
Immobiliser entièrement le
pont.
Passer sur chariot de direction
I ou chariot de direction II.
Compenser la distance des
chariots de direction ou la position de la charge par levage/descente ou
translation du chariot de direction vers la gauche/vers la droite.
 Repasser en fonctionnement
commun.
Repasser en fonctionnement
commun.
Arrêt progressif
et coupure totale des fins de course de chariot de direction/fins de course
levage
En fonctionnement commun, les fins de course de chariot de
direction ainsi que fins de course de levage sont évalués ensemble.
Si l’un des motoréducteurs du chariot de direction freine ou
s’arrête ou si l’un des mécanismes de levage freine ou s’arrête, l’autre chariot
de direction est régulé de façon synchrone.
Uniquement avec retournement
de charges
Si le pont est conçu pour le retournement de charges, le
limiteur de charge est éventuellement équipé de fonctions supplémentaires pour
permettre la détection d’une surcharge du mécanisme de levage également à
l’arrêt et à la descente.
Voir la documentation du pont relative à l’ordre
concerné.