Fin de course levage haut
Fin de course levage bas
L'ABULiner Levage/Abaissement :
─ L'ABULiner permet une commande continue de la vitesse de levage de treuils à câble.
─ Pour le commander, on utilise une boîte à boutons traditionnelle équipée de boutons-poussoirs à deux niveaux ou une radiocommande.
─ Uniquement avec double vitesse de levage : l'ABULiner permet de série une vitesse de levage maximale de jusqu'à 3 000 tr/min. En option, la vitesse de levage peut être augmentée (= doublée) jusqu'à 6 000 tr/min. Cela permet de travailler plus rapidement avec le pont. La vitesse de levage maximale possible et supplémentaire (au-dessus de 3 000 tr/min) dépend de la charge suspendue.
─ Uniquement avec ventilateur auxiliaire : le moteur de levage est équipé d'un ventilateur auxiliaire (option). Le ventilateur auxiliaire continue à tourner encore pendant quelques minutes après le levage ou l'abaissement.
Dans le cas de motoréducteurs du dispositif de levage sans commutation de polarité avec un seul enroulement (par ex. GM 800 und GM1000 modular und GM7000.2), le régime du moteur de levage est surveillé par le variateur de fréquence d'un codeur absolu séparé, ce qui permet d'atteindre le couple complet même à vitesses de levage très faibles et donc de maintenir la charge jusqu'à l'arrêt même sans frein.
Le variateur de fréquence :
─ Le variateur de fréquence ménage le frein à disque mécanique par freinage moteur du moteur de levage.
─ Le variateur de fréquence est programmé en fonction de la commande concernée et adapté aux caractéristiques techniques précises du moteur de levage et aux conditions qui règnent dans le bâtiment.
─ Uniquement pour ABULiner avec unité de réinjection : le variateur de fréquence réinjecte de l'énergie électrique dans le réseau. Cette énergie se crée lors du freinage dynamique du moteur de levage et est, depuis là, reconduite dans le réseau par le variateur de fréquence.
Ceci permet de faire des économies d'énergie, celle-ci n'étant pas, comme c'est habituellement le cas, conduite dans une résistance de freinage où elle doit être alors transformée en chaleur.
Dans le cas d'un variateur de fréquence à capacité de réinjection, l'utilisation d'une inductance réseau n'est pas nécessaire.
Uniquement avec ABULiner Schneider: l'unité de réinjection a une structure modulaire et se compose, selon la puissance, d'un ou de plusieurs modules.
─ Uniquement pour ABULiner Levage/Abaissement avec variateur de fréquence Schneider et ABULiner translation du chariot de direction : les variateurs de fréquence sont couplés entre eux. Le variateur de fréquence pour translation du chariot de direction obtient son énergie du variateur de fréquence pour le levage/la descente.
Le module de commande :
─ Un module de commande est nécessaire à l'exploitation d'un pont avec ABULiner.
─ Le module de commande active les signaux de commande de la boîte à boutons ou du récepteur de la radiocommande et du LIS-SV, avec isolation galvanique, sur les entrées du variateur de fréquence.
─ Il commande en plus le frein du moteur de levage.
─ Le module de commande permet un diagnostic des erreurs à l'aide de diodes pour les signaux de commande du LIS-SV.
─ L'émetteur d'impulsions est directement monté sur la fin de course de réducteur.
─ Il est formé d'un disque rotatif dont la circonférence porte 2000 repères comptés électroniquement.
─ En association avec le LIS-SV, l'émetteur d'impulsions surveille le sens et la vitesse de rotation du tambour à câble. Celle-ci est comparée aux valeurs de consigne du variateur de fréquence. Si le tambour à câble tourne à une vitesse de 20 % supérieure à la vitesse à laquelle il doit tourner ou s'il tourne dans le mauvais sens, le contacteur principal du pont est immédiatement désactivé pour des raisons de sécurité et le moteur de levage est freiné.
─ L'émetteur d'impulsions transmet la position du tambour à câble au LIS-SV avec 2000 impulsions par tour. Ceci permet un positionnement exact de la position la plus haute et de la position la plus basse du crochet.
Le système d'indication de charge LIS-SV :
─ Le LIS-SV surveille le bon fonctionnement de l'ensemble du système ABULiner.
─ Le LIS-SV calcule la vitesse de levage et le sens de rotation à partir du signal de l'émetteur d'impulsions.
─ Le LIS-SV est entièrement intégré dans l'ABULiner.
─ Le LIS-SV analyse les signaux de commande de la boîte à boutons ou de la radiocommande et de l'émetteur d'impulsions et commande les entrées du module de commande.
─ Le LIS-SV détermine la charge suspendue et désactive le moteur de levage en cas de surcharge.
─ Le LIS-SV détecte si une charge est soulevée par à-coups. Dans ce cas, la vitesse de levage est réduite pour atteindre environ 15 Hz jusqu'à ce que le levage rapide de la charge soit terminé.
─ Uniquement avec ventilateur auxiliaire : le LIS-SV commande le nombre de minutes que le ventilateur auxiliaire du moteur de levage continue à tourner.
─ Uniquement avec double vitesse de levage : le LIS-SV mesure la masse de la charge suspendue et calcule la vitesse maximale avec laquelle le pont peut monter (entre 3000 tr/min et 6000 tr/min) pour obtenir le couple nécessaire à la charge.
Le fin de course du réducteur :
|
Fin de course levage haut |
|
|
| |
|
|
Fin de course levage bas |
─ Le treuil à câble possède un fin de course de réducteur qui sert de fin de course de levage. Il est directement couplé au tambour à câble. Il fait en sorte que le crochet de levage ne dépasse pas la position la plus haute ni la position la plus basse du crochet.
─ Le point de commutation supérieur s'appelle « Fin de course levage haut » (deuxième vis de réglage blanche vue par l'arrière), le point de commutation inférieur s'appelle « Fin de course levage bas » (vis de réglage blanche la plus à l'avant).
─ Lorsque le crochet de levage atteint le point de commutation de la fin de course levage, le variateur de fréquence, commandé par le LIS-SV, freine lentement le moteur de levage. Les points de commutation ne doivent pas être engagés en exploitation, c'est-à-dire de façon planifiée.
─ Il peut y avoir en option des points de commutation supplémentaires entre les deux fins de courses levage, ceux-ci pouvant être utilisés pour des commutations particulières.
─ Uniquement pour les fins de course de réducteur avec vis de réglage noire supplémentaire : la vis de réglage noire permet de décaler ensemble tous les points de commutation.
|
Fin de course levage de secours |
|
|
─ La fin de course de réducteur dispose par défaut d'un autre point de commutation. Il s'agit de la fin de course levage de secours (vis de réglage blanche la plus à l'arrière). Elle se situe au-dessus de la fin de course levage haut.
─ Si le fin de course levage haut ne fonctionne plus (par ex. en raison de contacts de contacteur défectueux, d'un champ rotatif avec inversion de polarité,...) et que le crochet de levage se déplace au-delà du point de commutation du fin de course levage haut, le fin de course levage de secours désactive le contacteur principal et ainsi l'ensemble du pont.
─ La fin de course levage de secours est réglée et plombée en usine.
Engagement en exploitation :
─ Normalement, les points de commutation de la fin de course levage haut et bas ne doivent pas être engagés (en exploitation) car les microrupteurs de la fin de course levage pourraient s'user en raison d'une utilisation régulière.
─ Si les points de commutation sont engagés en exploitation, une fin de course levage de secours supplémentaire doit être présente, celle-ci garantissant une désactivation en toute sécurité en cas d'usure d'un microrupteur de la fin de course levage. Cette fin de course levage de secours doit être contrôlée régulièrement.
─ Fin de course levage de secours pour fin de course levage haut : le fin de course levage haut dispose par défaut d'un fin de course levage de secours. Si la fin de course levage haut doit être engagée en exploitation, un interrupteur à garrot est prévu sur le treuil à câble, celui-ci permettant de ponter la fin de course levage haut afin de pouvoir contrôler la fin de course levage de secours.
─ Fin de course levage de secours pour fin de course levage bas : Si le fin de course levage bas doit être engagé en exploitation, un fin de course de réducteur avec au moins quatre points de commutation est utilisé. Ce quatrième point de commutation est utilisé en tant que fin de course levage de secours sous la fin de course levage bas. En outre, un interrupteur à garrot est prévu sur le treuil à câble, celui-ci permettant de ponter la fin de course de levage bas afin de pouvoir contrôler la fin de course levage de secours.
|
|
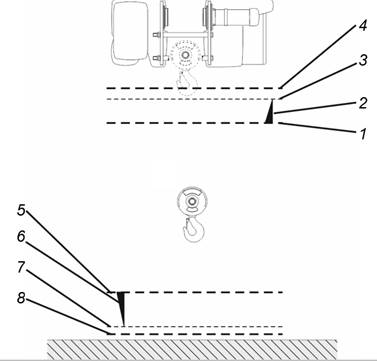
Fin de course levage haut :
─ 1 : Point de commutation de fin de course levage haut. Si celui-ci est actionné, le LIS-SV débute la phase de freinage du crochet de levage.
─ 2 : le crochet de levage freine à partir du LIS-SV programmé.
─ 3 : Le crochet de levage s'immobilise juste avant la fin de course levage de secours.
─ 4 : point de commutation du fin de course levage de secours. Si celui-ci est actionné (par ex. si le microrupteur du fin de course levage haut est usé), le fin de course de réducteur désactive le contacteur principal et ainsi l'ensemble du pont.
Si la fin de course levage haut doit être engagée en exploitation, un interrupteur à garrot est prévu sur le treuil à câble, celui-ci permettant de ponter la fin de course levage haut afin de pouvoir contrôler la fin de course levage de secours.
Fin de course levage bas :
─ 5 : Point de commutation de fin de course levage bas. Si celui-ci est actionné, le LIS-SV débute la phase de freinage du crochet de levage.
─ 6 : le crochet de levage freine à partir du LIS-SV programmé.
─ 7 : le crochet de levage s'arrête juste avant la position la plus basse du crochet (ex. : sol du bâtiment).
─ 8 : Si la fin de course levage bas doit être engagée en exploitation, une fin de course de réducteur avec au moins quatre points de commutation est utilisée. Ce quatrième point de commutation est utilisé en tant que fin de course levage de secours sous la fin de course levage bas. En outre, un interrupteur à garrot est prévu sur le treuil à câble, celui-ci permettant de ponter la fin de course de levage bas afin de pouvoir contrôler la fin de course levage de secours.