Monter, régler et effectuer l'apprentissage du capteur de
distance [2]
Capteur de distance pour translation du chariot de
direction : à l'aide du capteur de distance, les chariots de direction
mesurent, via rayon laser, leur distance par rapport à l'extrémité de la poutre
principale. L'arrêt progressif et la coupure totale sont réalisés à partir de
cette mesure (au lieu des interrupteurs à levier en croix habituels) ; de
plus, le système calcule la sécurité anti-collision par l'intermédiaire de la
position des deux chariots de direction ainsi calculée. En fonctionnement commun
des deux chariots de direction, l'écart toujours constant entre les chariots de
direction est également calculé et réglé sur la base de cette mesure.
Capteur de distance pour translation du pont : à l'aide
du capteur de distance, les ponts mesurent, via rayon laser, leur distance par
rapport au pont duplex (ou par rapport aux deux ponts duplex). Ceci permet de
réaliser l'arrêt progressif et la coupure totale par rapport au(x) pont(s)
duplex (au lieu des cellules photoélectrique à réflexion habituelles). C'est
également à partir de cette mesure que le système règle la distance continue
pour le fonctionnement en tandem. L'arrêt progressif et la coupure totale à la
fin de chemin de roulement s'effectue à l'aide d'interrupteurs à levier en
croix.
En général, un maintien à distance de ponts pour des raisons
statiques ou des raisons de charge s'effectue par l'intermédiaire de cellules
photoélectriques à réflexion ou de cellules photoélectriques à voie unique. Pour
la commande de profil du bâtiment, des interrupteurs à levier en croix sont
habituellement utilisés.
Pour cette étape de travail, un accès à KranOS via un
ordinateur portable ou une tablette est requis. L'utilisateur
« Abnahme » (réception) (niveau d'utilisateur [2]‚) doit être
connecté.
|

|
Risque de dysfonctionnement
Le capteur de distance ne peut remplir sa fonction
de sécurité que s'il est correctement fixé. Si ce n'est pas le cas, des
dysfonctionnements peuvent se produire (par exemple, le capteur de
distance risque de tomber s'il n'est pas correctement fixé).
Fixer et orienter le capteur de distance et le
réflecteur avec précaution. |
Aperçu :
capteur de distance et réflecteur
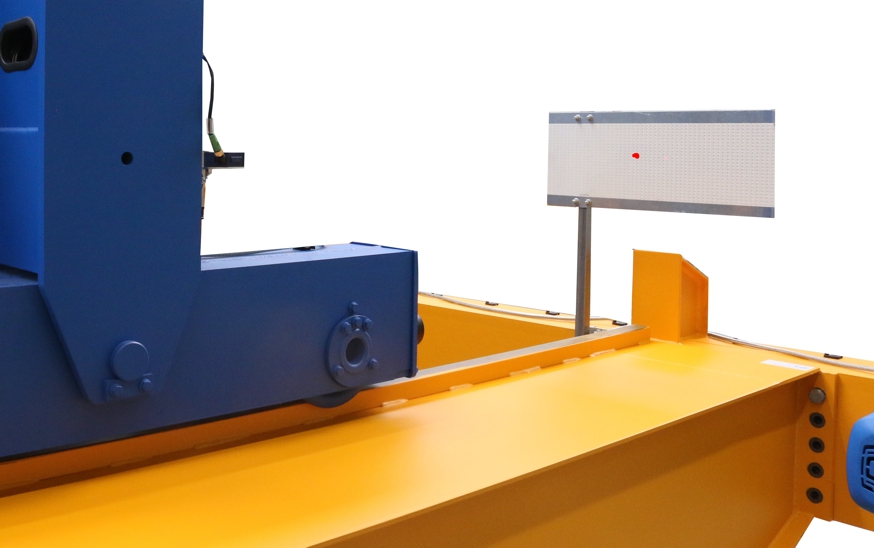
─ Avec
capteur de distance pour translation du pont : le capteur de distance du
pont et le réflecteur pour le capteur de distance du pont duplex sont fixés au
sommier sur un support commun. Sur le pont duplex, la disposition du capteur de
distance et du réflecteur est donc inversée. Les rayons laser du capteur de
distance ne doivent pas se croiser.
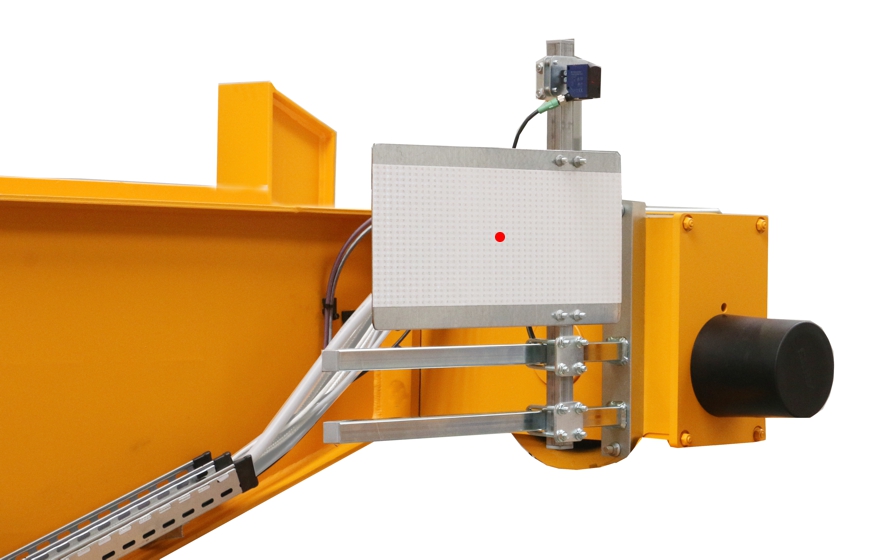
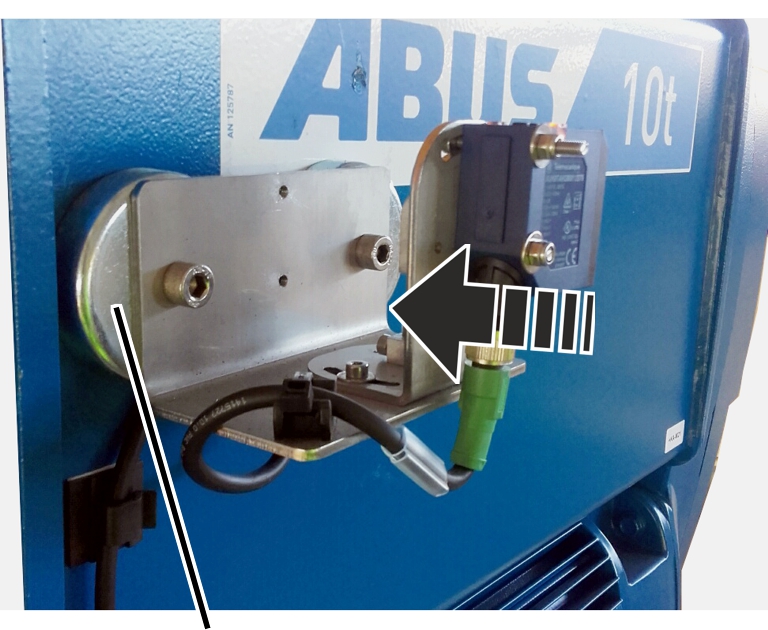
─ Avec
capteur de distance pour translation du chariot sur le treuil à câble
GM modular : le capteur de distance est introduit latéralement dans le
cache du tambour à câble sur un support. Le réflecteur est collé sur le sommier
du pont sous forme de film adhésif ou fixé à un tube carré.
─ Avec
capteur de distance pour translation du chariot sur le treuil à câble
GM kompakt : le capteur de distance est monté sur le châssis du
chariot de direction avec un support magnétique. Le réflecteur est collé sur le
sommier du pont sous forme de film adhésif ou fixé à un tube carré.
Monter le
capteur de distance
Le capteur de distance doit être fixé à un tube carré avec un
support sur le sommier ou installé sur le treuil à câble avec un support
magnétique.
Uniquement avec
capteur de distance sur tube carré
Montage du
support pour les cellules photoélectriques
|
Étrier fileté |
|
|
|
|
Support |
Bride
pour tuyau |
|
|
|
 Fixer le support au sommier.
Fixer le support au sommier.
Visser le support avec l'étrier
fileté.
|
Étrier fileté |
Couple de serrage |
|
M8 |
25 Nm |
|
M10 |
50 Nm |
|
M12 |
75 Nm |
Enfiler et fixer les 2 brides
pour tuyau.
 Introduire le tube carré dans
les brides pour tuyau et le visser.
Introduire le tube carré dans
les brides pour tuyau et le visser.
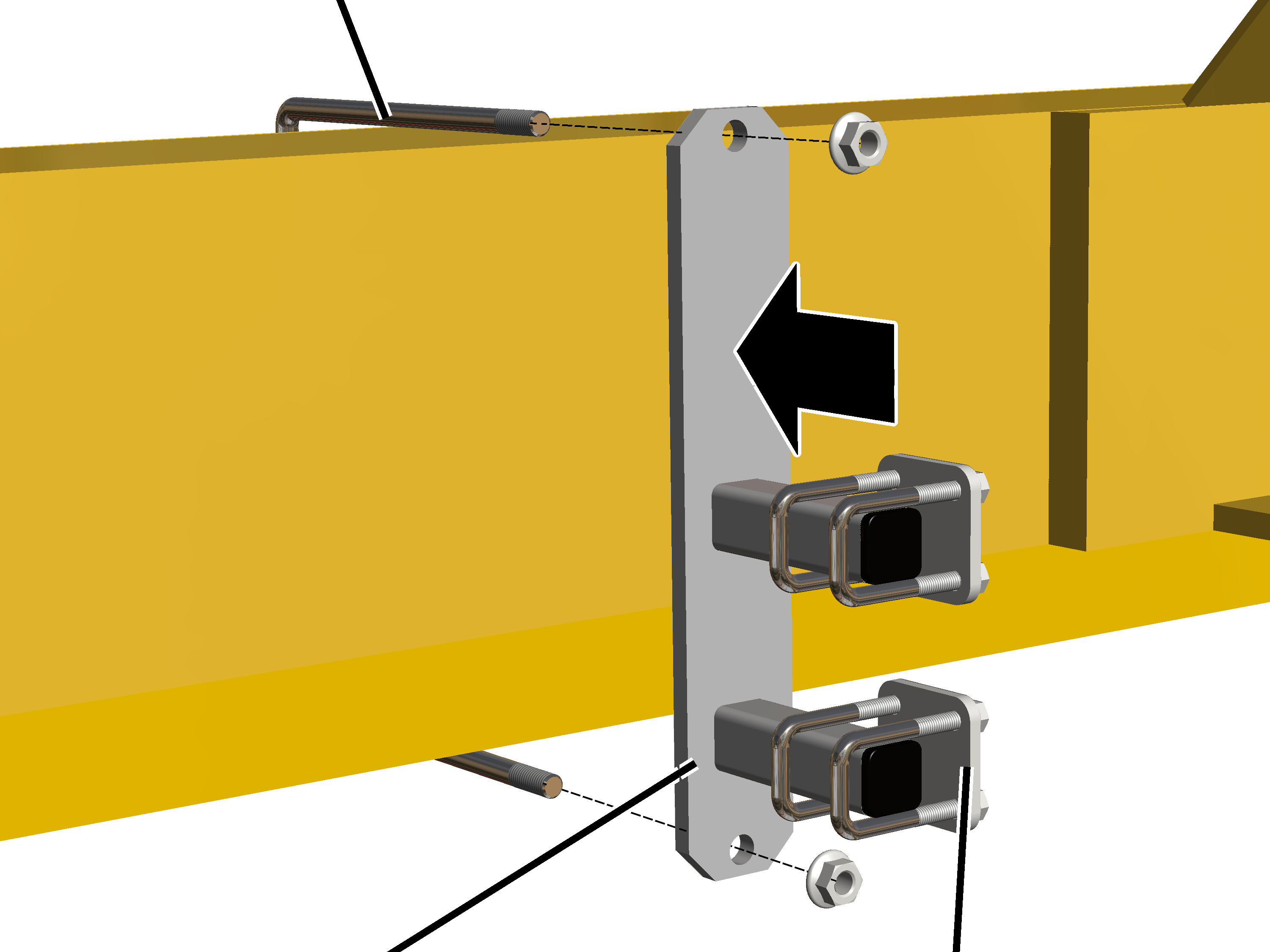
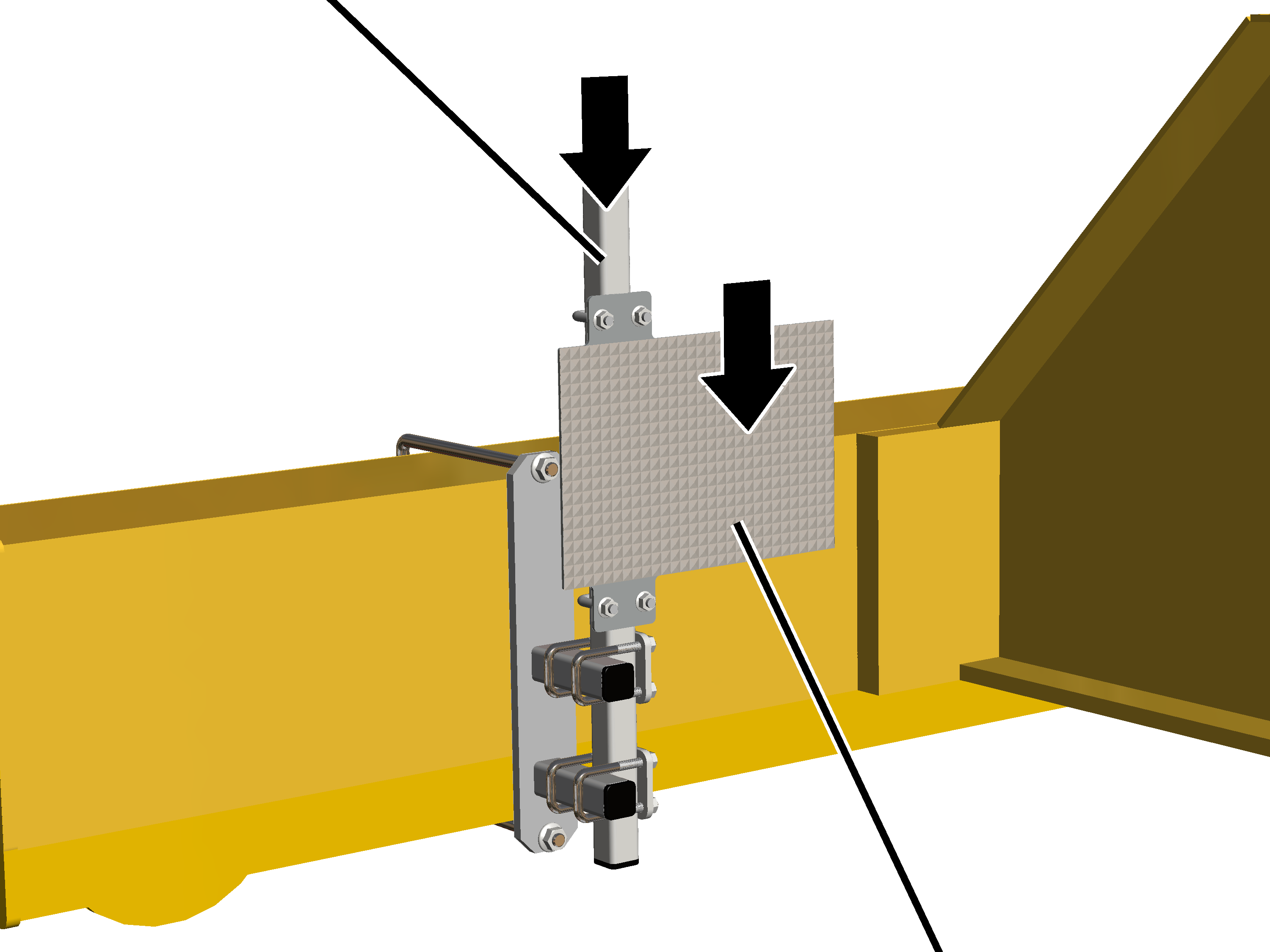
|
Adaptateur |
Plaque
de fixation |
|
|
|
Capteur
de distance |
|
Glisser le support complet sur
le tube carré.
Fixer le support à l'aide des
écrous à côtes M8 (4x).
Glisser le capteur de distance
dans l'adaptateur sur la plaque de fixation et serrer les vis.
Uniquement avec
capteur de distance sur support magnétique
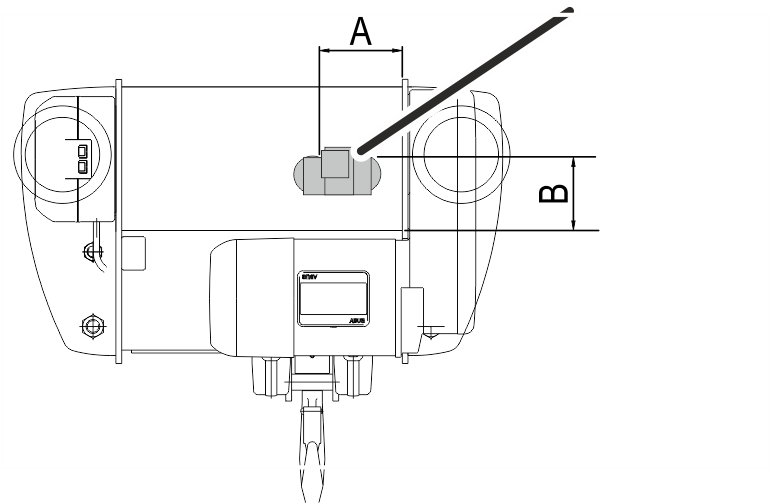
Sur le dessin suivant, choisir
la taille et le type appropriés.
Relevez les cotes dans le
tableau suivant.
|
|
Support
magnétique |
|
|
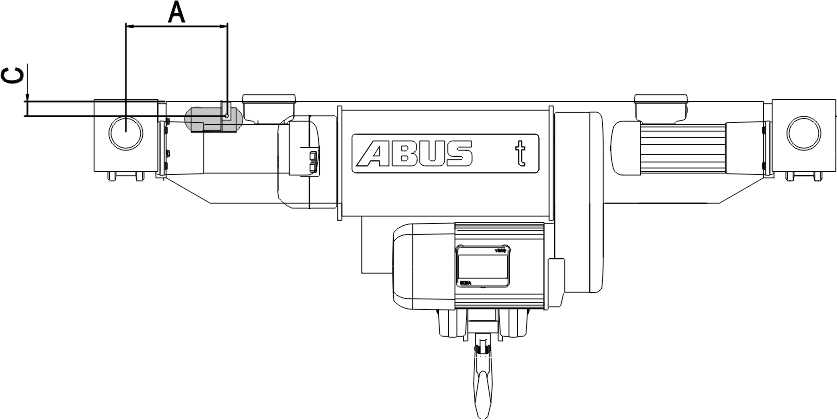
Position de montage du support magnétique sur le
treuil à câble E
|
Taille |
Cote A |
Cote B |
|
800 4/1 |
130 |
100 |
|
1000 2/1 |
130 |
130 |
|
1000 4/1 |
130 |
130 |
|
2000 2/1 |
130 |
130 |
|
2000 4/1 |
130 |
160 |
|
3000 2/1 |
130 |
160 |
|
3000 4/1 |
130 |
160 |
|
5000 2/1 |
130 |
160 |
|
5000 4/1 |
130 |
200 |
|
6000 2/1 |
130 |
160 |
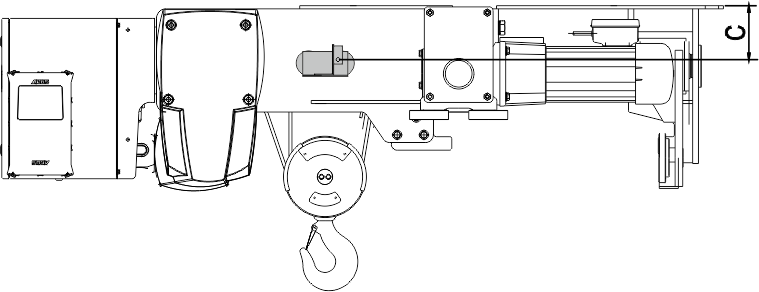
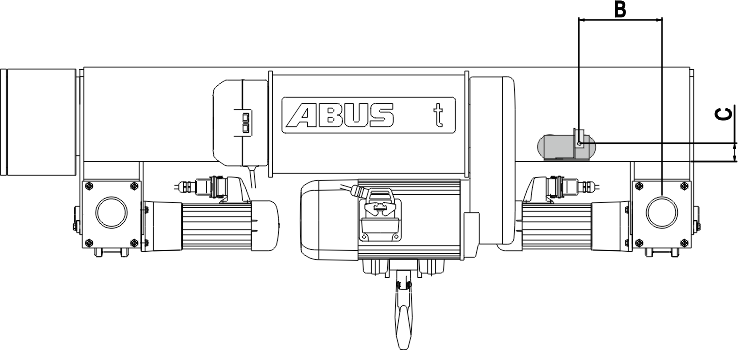
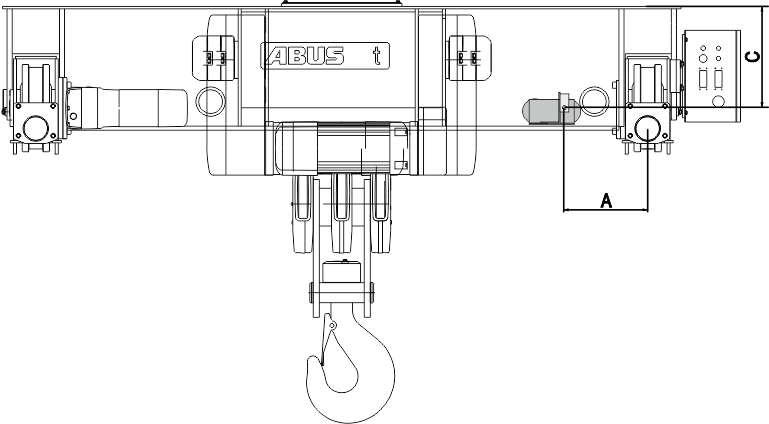
Position de montage du support magnétique sur le
treuil à câble S. Tenir compte de la cote C et fixer le capteur de distance en
le centrant le plus possible sur l'entraînement par câble.
|
Taille |
Cote A |
|
800 4/1 |
140 |
|
1000 4/1 |
180 |
|
2000 4/1 |
180 |
|
3000 2/1 |
180 |
|
3000 4/1 |
245 |
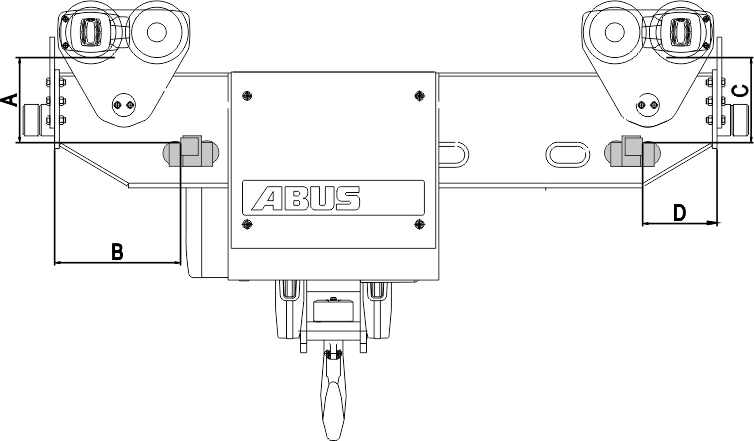
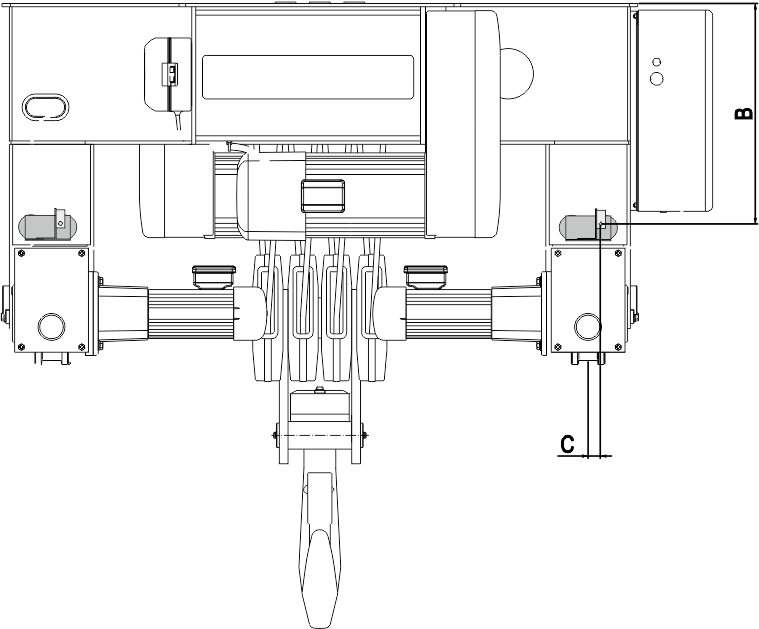
Position de montage du support magnétique sur le
treuil à câble U. Tenir compte des différentes positions pour le capteur de
distance gauche et droit.
|
Taille |
Cote A |
Cote B |
Cote C |
Cote D |
|
5000 4/1 |
330 |
350 |
310 |
660 |
|
6000 2/1 |
325 |
640 |
285 |
560 |
|
6000 4/1 |
400 |
320 |
370 |
595 |
|
7000 2/1 |
360 |
420 |
450 |
550 |
Position de montage du support magnétique sur le
treuil à câble D.
|
Taille |
Cote A |
Cote B |
|
800 4/1 |
210 |
60 |
|
1000 4/1 |
200 |
50 |
|
2000 2/1 |
200 |
50 |
|
2000 4/1 |
200 |
50 |
|
3000 2/1 |
225 |
50 |
|
3000 4/1 |
225 |
50 |
|
5000 2/1 |
200 |
50 |
|
5000 4/1 |
130 |
50 |
|
5000 4/2 |
200 |
50 |
|
5000 6/1 |
130 |
50 |
|
6000 2/1 |
200 |
45 |
|
6000 4/1 |
170 |
50 |
|
6000 6/1 |
200 |
50 |
|
7000 2/1 |
190 |
50 |
|
7000 4/1 |
190 |
50 |
|
7000 4/2 |
190 |
50 |
|
7000 6/1 |
190 |
60 |
|
7000 8/2 |
190 |
50 |
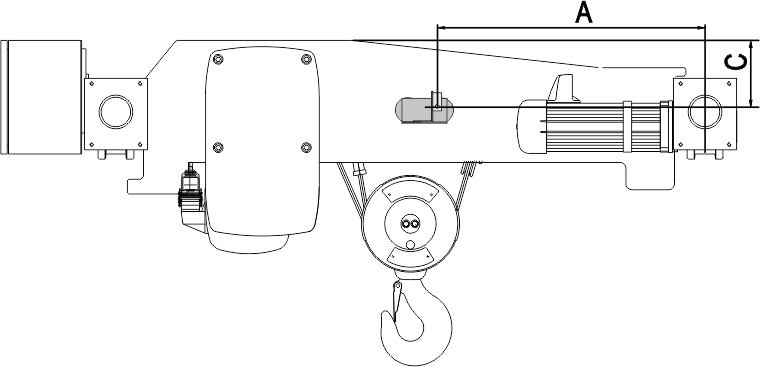
Position de montage du support magnétique sur le
treuil à câble DA.
|
Taille |
Cote A |
Cote C |
|
800 4/1 |
540 |
30 |
|
1000 4/1 |
250 |
35 |
|
2000 2/1 |
520 |
55 |
|
2000 4/1 |
520 |
55 |
|
3000 2/1 |
470 |
50 |
|
3000 4/1 |
550 |
60 |
|
5000 2/1 |
550 |
45 |
|
5000 4/1 |
610 |
55 |
|
6000 2/1 |
565 |
50 |
|
6000 4/1 |
700 |
55 |
|
7000 2/1 |
590 |
70 |
|
7000 4/1 |
390 |
170 |
|
7000 6/1 |
350 |
200 |
Position de montage du support magnétique sur le
treuil à câble DQA. Tenir compte de la cote C et fixer le capteur de distance en
le centrant le plus possible sur l'entraînement par câble.
|
Taille |
Voie |
Cote C |
|
2000 |
1400 |
100 |
|
3000 |
1400 |
85 |
|
2000 |
1600 |
100 |
|
3000 |
1600 |
85 |
|
5000 |
1600 |
75 |
|
6000 |
1600 |
80 |
|
2000 |
2000 |
95 |
|
3000 |
2000 |
85 |
|
5000 |
2000 |
75 |
|
6000 |
2000 |
85 |
|
2000 |
2500 |
100 |
|
3000 |
2500 |
80 |
|
5000 |
2500 |
75 |
|
6000 |
2500 |
85 |
|
7000 |
2500 |
100 |
|
7000 |
3000 |
100 |
|
7000 |
3500 |
100 |
Position de montage du support magnétique sur le
treuil à câble Z.
|
Taille |
Cote B |
|
5000 4/2 |
535 |
|
5000 8/2 |
580 |
|
6000 4/2 |
565 |
|
6000 8/2 |
570 |
|
7000 4/2 |
725 |
|
7000 6/2 |
850 |
|
7000 8/2 |
660 |
|
7000 10/2 |
300 |
|
7000 12/2 |
470 |
Position de montage du support magnétique sur le
treuil à câble ZA.
|
Taille |
Cote A |
Cote C |
|
5000 8/2 |
315 |
355 |
|
6000 8/2 |
315 |
200 |
|
7000 6/2 |
440 |
500 |
|
7000 8/2 |
420 |
482 |
|
7000 10/2 |
500 |
570 |
|
|
|
Support
magnétique |
|
Installer le support magnétique
sur le treuil à câble.
La position indiquée se réfère au point du capteur de distance
au niveau duquel le rayon laser sort du capteur de distance.
Selon la situation de montage, la position du support magnétique
est éventuellement déjà marquée.
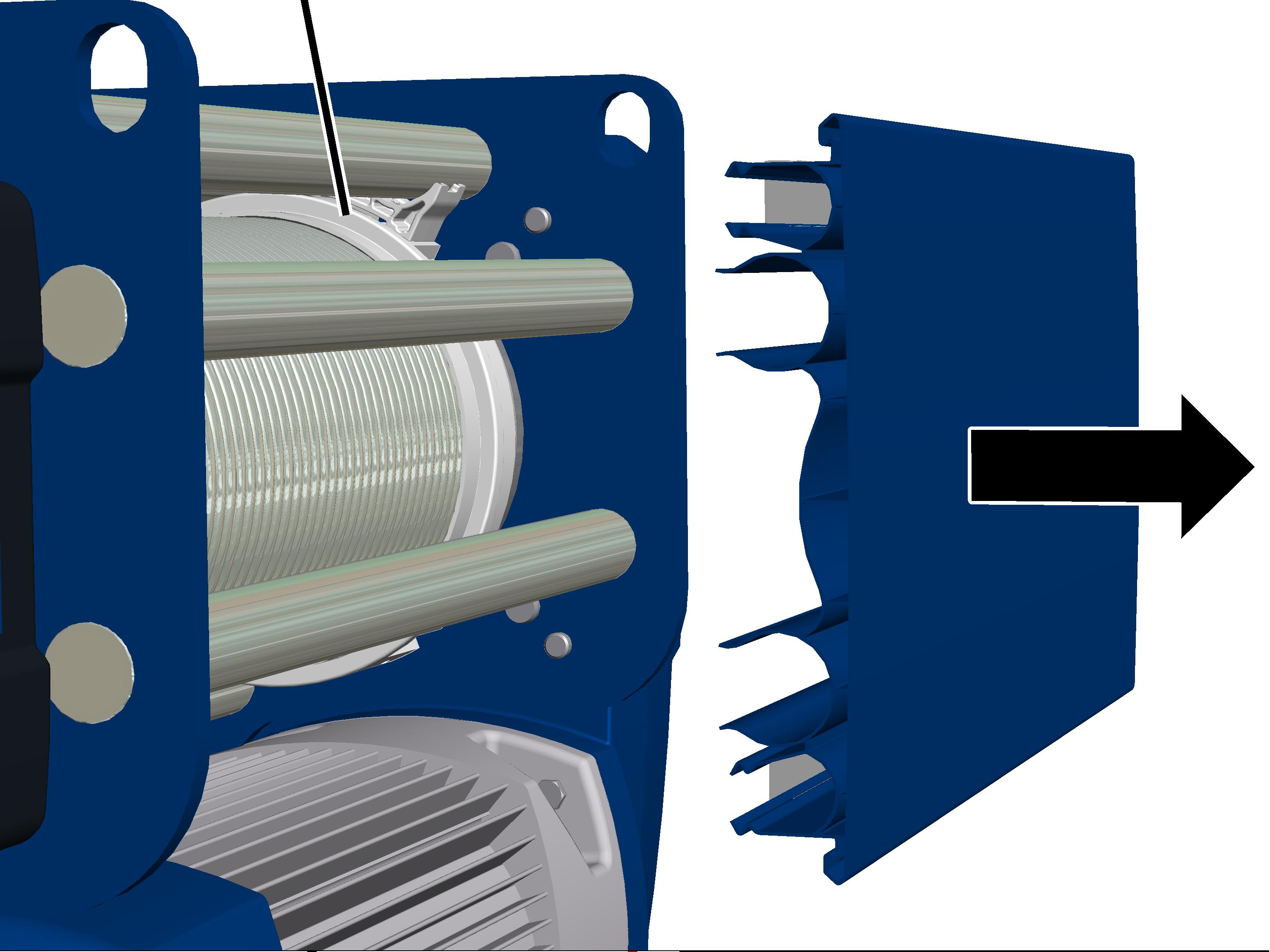
Uniquement avec
treuil à câble GM modulaire
|
Côté
tambour |
|
|
|
Retirer le cache du côté
tambour.
|
|
Support |
|
|
À l'aide de la fente, introduire
le support latéralement dans le cache.
Mettre en place le cache sur le
treuil à câble.
Glisser le capteur de distance
dans l'adaptateur sur la plaque de fixation et serrer les vis.
Monter le
réflecteur
Marche tandem : éloignez
les ponts le plus possible l'un de l'autre.
Fonctionnement commun de deux
chariots de direction : éloignez les chariots de direction le plus possible
l'un de l'autre.
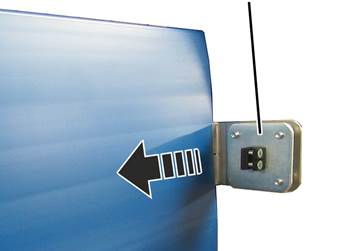
Uniquement avec
réflecteur comme film adhésif
Positionner le réflecteur comme
film adhésif de sorte à ce que le point laser se trouve le plus au milieu
possible.
Le réglage exact aura lieu plus tard sur le capteur de distance.
La position du film collé ne peut plus être rectifiée.
Presser le film adhésif.
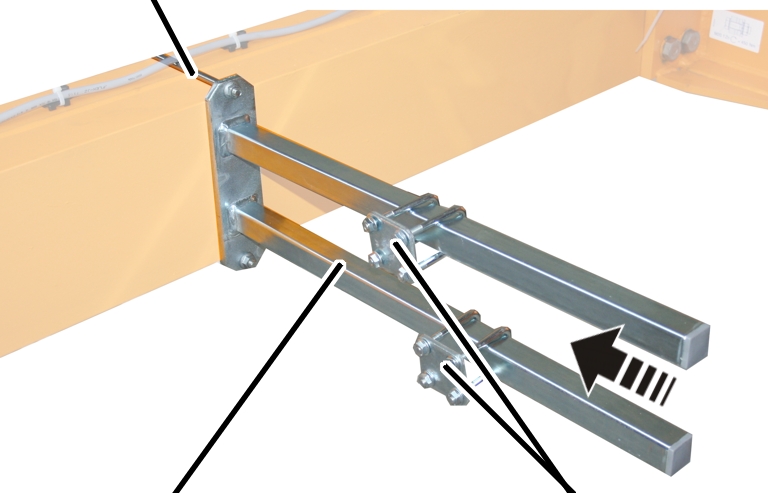
Uniquement avec
réflecteur sur un tube carré
|
Étrier
fileté |
|
|
|
|
Support |
Bride
pour tuyau |
Visser le support avec l'étrier
fileté.
|
Étrier fileté |
Couple de serrage |
|
M8 |
25 Nm |
|
M10 |
50 Nm |
|
M12 |
75 Nm |
Enfiler et fixer les 2 brides
pour tuyau.
|
tube
carré |
|
|
|
|
|
Réflecteur |
Introduire le tube carré dans
les brides pour tuyau.
Glisser le réflecteur sur le
tube carré.
Déplacer le réflecteur de sorte
à ce que le point laser se trouve le plus au milieu possible.
Le réglage exact aura lieu plus tard sur le capteur de
distance.
Bien visser manuellement les
brides pour tuyau et le réflecteur à l'aide des 4 écrous à côtes M8.
Régler le
capteur de distance
Uniquement avec
support
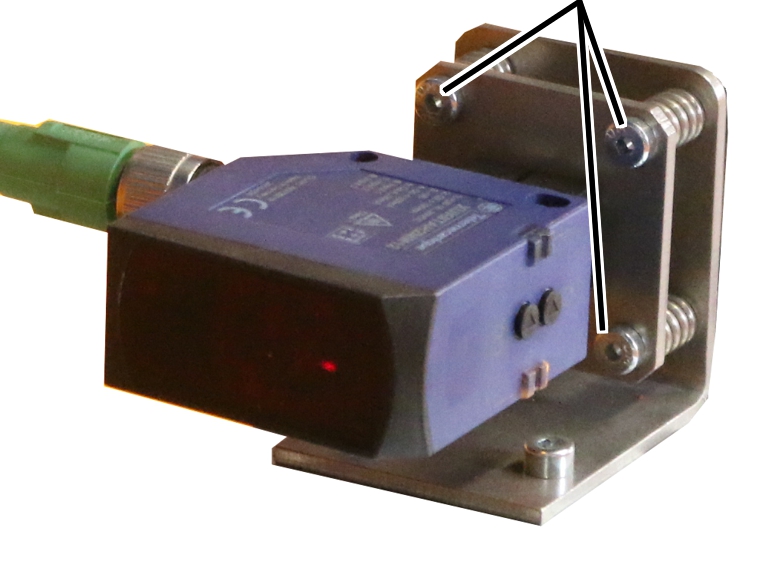
|
|
Vis à
tête cylindrique M6x20 |
|
|
Régler le capteur de distance à
l'aide des vis à tête cylindrique M6x20 (3x) de sorte à ce que le pont
laser se trouve exactement au milieu du réflecteur.
● Si le
capteur de distance reçoit le rayon laser renvoyé par le réflecteur, les LED du
capteur de distance s'allument.
● Si le
capteur de distance nr reçoit pas le rayon laser, une des LED du capteur de
distance clignote.
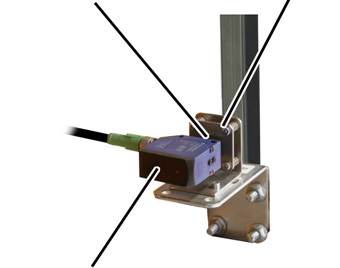
Uniquement avec
support magnétique
Régler le capteur de distance à l'aide du réglage grossier et
du réglage fin de sorte à ce que le point laser se trouve exactement au milieu
du réflecteur.
|
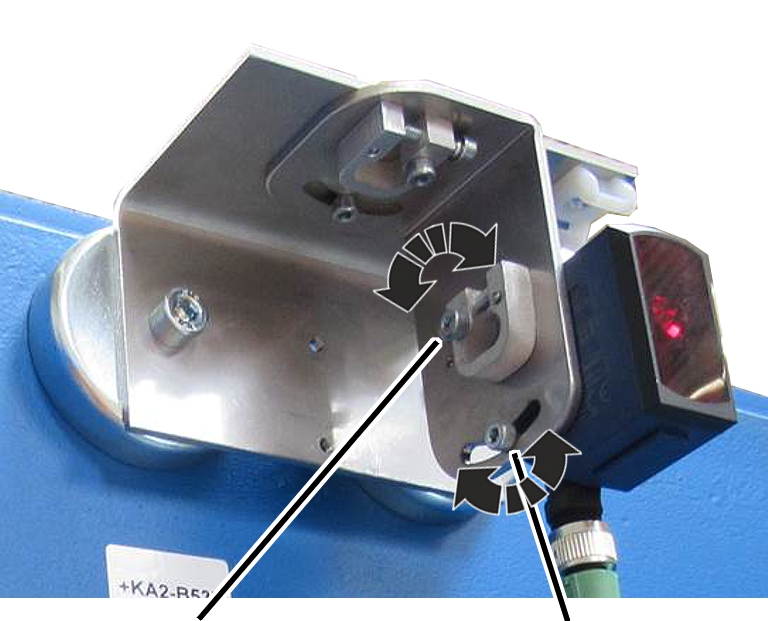
|
|
Vis à
tête cylindrique pour le réglage fin |
Vis à
tête cylindrique pour le réglage grossier |
Desserrer la vis à tête
cylindrique pour le réglage grossier dans le trou oblong et basculer le capteur
de distance.
Si nécessaire : desserrer
la vis à tête cylindrique du réglage fin et effectuer le réglage fin du capteur
de distance avec la courte vis à tête cylindrique transversale.
● Si le
capteur de distance reçoit le rayon laser renvoyé par le réflecteur, les LED du
capteur de distance s'allument.
● Si le
capteur de distance nr reçoit pas le rayon laser, une des LED du capteur de
distance clignote.
Visser les 2 longues vis à tête
cylindrique.
Parcourir le champ de
déplacement complet avec le pont ou le chariot de direction et contrôler si le
rayon laser touche le réflecteur en chaque position sans s'éloigner dans le sens
latéral ou horizontal.
Afficher les
réglages du capteur de distance
|
Aperçu : navigation dans KranOS |
|
Utilisateur « Abnahme » (réception) à « Translation du pont »
à « Capteurs de distance
pour translation du pont » |
|
Utilisateur « Abnahme » (réception) à « Translation de
chariot » à
« Capteurs de distance pour translation du
chariot » |
Se connecter dans KranOS avec
l'utilisateur « Abnahme » (réception) (niveau d'utilisateur [2]‚).
Voir « Connecter un
ordinateur portable ou une tablette à ABUControl ».
Dans le menu principal,
sélectionner le motoréducteur de chariot de direction ou le motoréducteur de
pont souhaité (par exemple Translation du chariot de direction 1 ou
Translation du pont).
● La fenêtre
du motoréducteur souhaité apparaît.
Dans le menu
« Réglages » (roue dentée sur fond jaune), cliquer sur l'option de
menu « Capteurs de distance pour translation du pont » (ou
« Capteurs de distance pour translation du chariot »).
Effectuer
l'apprentissage du capteur de distance
Un apprentissage du capteur de distance est alors effectué.
Pour ce faire, le pont/chariot de direction est déplacé à la position souhaitée,
et la valeur déterminée pour cette position par le capteur de distance est
sauvegardée dans ASBUControl.
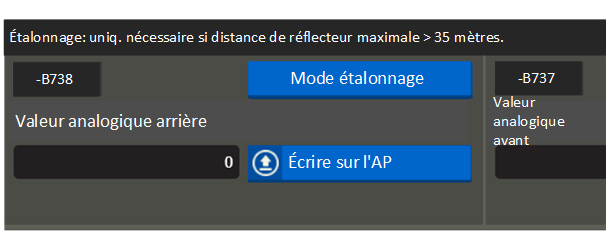
Remarque concernant le « Mode étalonnage » :
La zone supérieure de la fenêtre « Capteurs de distance
pour translation du pont » ou « Capteurs de distance pour translation
du chariot » sert à l'étalonnage du capteur de distance si la distance
maximale du réflecteur dépasse 35 mètres. Cela n'est que rarement
nécessaire. En outre, cette zone de KranOS n'est prévue que pour des versions
futures de KranOS et n'a pas encore de fonction.
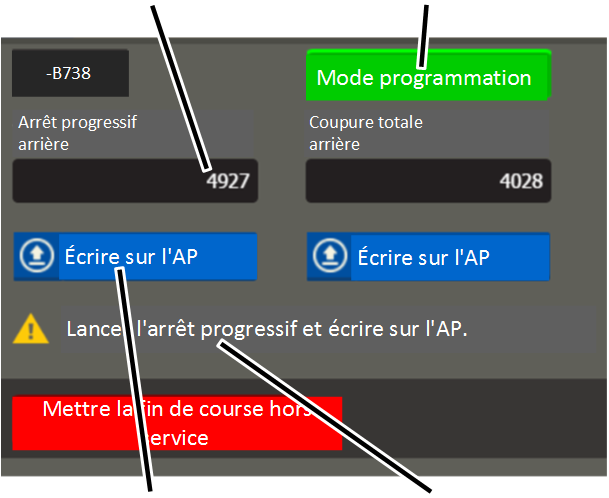
|
Zone de
texte avec la position actuelle |
Bouton
« Mode programmation » |
|
|
|
Bouton
« Écrire sur l'AP » |
Message
avec le point de commutation suivant à engager |
Cliquer sur le bouton
« Mode programmation ».
● Le bouton
apparaît sur fond vert.
● Le mode
d'apprentissage est activé.
● Le bouton
« Mettre la fin de course hors service » apparaît sur fond rouge.
D'éventuels points de commutation sauvegardés pour l'arrêt
progressif et la coupure totale sont désormais ignorés.
Le chariot de direction (le pont) peut alors être déplacé à de
nouvelles positions quelconques.
● Un message
apparaît demandant quel point de commutation (arrêt progressif ou coupure
totale) doit être atteint.
Déplacer le chariot (le pont) à
la position correspondante.
Le capteur de distance doit être éloigné au moins 0,5 m du
réflecteur.
Dans la colonne du point de
commutation à apprendre : cliquer sur le bouton « Écrire sur
l'AP ».
● La valeur
mesurée pour la position actuelle est affichée dans la zone de texte.
La valeur affichée est une valeur mesurée sans unité de mesure à
partir de laquelle la position sera calculée plus tard.
Répéter la procédure pour les
autres points de commutation.
Après la sauvegarde des points de commutation :
● Le mode
d'apprentissage est arrêté automatiquement.
● Le
contournement des fins de course est désactive automatiquement.