Se connecter dans KranOS avec
l'utilisateur « Abnahme » (réception) (niveau d'utilisateur [2]‚).
Voir « Connecter un
ordinateur portable ou une tablette à ABUControl ».
Se connecter dans KranOS avec
l'utilisateur « Abnahme » (réception) (niveau d'utilisateur [2]‚).
Voir « Connecter un
ordinateur portable ou une tablette à ABUControl ».En exploitation normale, ABUControl engage la phase de freinage du motoréducteur du dispositif de levage peu avant le point de commutation de la fin de course levage haut/bas. Chaque fois, ABUControl calcule individuellement à quel point la phase de freinage commence, en fonction de la vitesse de levage actuelle. Si le crochet de levagem monte trop rapidement, la phase de freinage commence plus tôt. Si le crochet de levage monte plus lentement, la phase de freinage commence plus tard.
Directement avant le point de commutation de la fin de course levage, le crochet de levage ne se déplace qu'à la vitesse de levage lente et continue de se déplacer à cette vitesse jusqu'à ce que le point de commutation soit actionné, ce qui arrête le crochet de levage. Normalement, ceci n'a lieu que sur une courte distance (quelques centimètres).
Cependant, si par exemple le point de commutation de la fin de course de levage a été modifié, ABUControl ne connaît pas encore la position finale et le nouveau début de la phase de freinage qui en résultent. Dû à ce fait, il peut arriver que le crochet de levage se déplace à la vitesse de levage lente sur une longue distance (si le point de commutation a été fortement modifié).
Dans des cas pareils, le point à partir duquel le crochet de levage se déplace à la vitesse de levage lente (fin de la phase de freinage) peut être modifié temporairement. Dès que le point de commutation de la fin de course levage est actionné, cette modification manuelle est supprimée pour que la phase de freinage se termine à nouveau immédiatement avant le point de commutation de la fin de course levage.
Pour cette étape de travail, un accès à KranOS via un ordinateur portable ou une tablette est requis. L'utilisateur « Abnahme » (réception) (niveau d'utilisateur [2]‚) doit être connecté.
La séquence décrite ici ne modifie que temporairement la position finale de la phase de freinage d'ABUControl. Les points de commutation de la fin de course levage n'en sont pas affectés.
|
Aperçu : navigation dans KranOS |
|
Utilisateur « Abnahme » (réception) à « Mécanisme de levage » à « Étalonnage du mécanisme de levage » |
Se connecter dans KranOS avec
l'utilisateur « Abnahme » (réception) (niveau d'utilisateur [2]‚).
Voir « Connecter un
ordinateur portable ou une tablette à ABUControl ».
 Dans le menu principal,
sélectionner le mécanisme de levage souhaité (par exemple le mécanisme de
levage 1).
Dans le menu principal,
sélectionner le mécanisme de levage souhaité (par exemple le mécanisme de
levage 1).
● La fenêtre du mécanisme de levage souhaité apparaît.
Dans le menu
« Réglages » (roue dentée sur fond jaune), cliquer sur l'option de
menu « Étalonnage du mécanisme de levage ».
|
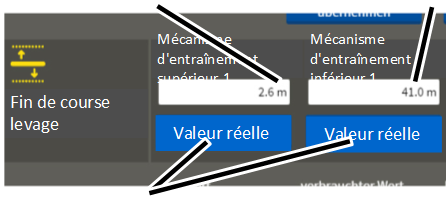
Champ de saisie longueur de câble « Fin de course levage Mécanisme d'entraînement supérieur 1 » |
Champ de saisie longueur de câble « Fin de course levage Mécanisme d'entraînement inférieur 1 » |
|
| |
|
Bouton « Valeur réelle » |
|
● La fenêtre « Étalonnage du mécanisme de levage » apparaît.
Dans les champs de saisie,
entrer la longueur de câble à laquelle le crochet de levage doit s'arrêter (donc
où la phase de freinage s'arrête).
ou
Déplacer le crochet de levage à la position souhaitée et cliquer sur le bouton « Valeur réelle » sous le champ de saisie correspondant.
─ Dans les champs de saisie, on indique la longueur de câble (longueur du câble déroulé entre le tambour à câble et le point fixe). La position du crochet n'est pas indiquée !
─ La longueur de câble doit être entrée de manière séparée pour un mécanisme d'entraînement 1 et un mécanisme d'entraînement 2 (en cas d'un double mécanisme de levage).
Cliquer sur le bouton
« Écrire sur l'AP ».
● Les valeurs réglées sont sauvegardées.
Levage et descente :
● Peu avant les valeurs réglées, ABUControl commence la phase de freinage du motoréducteur du dispositif de levage. Chaque fois, ABUControl calcule individuellement à quels points la phase de freinage commence, en fonction de la vitesse de levage actuelle.
Au prochain engagement du point de commutation de la fin de course levage haut/bas :
● Le réglage précédent est écrasé.
● ABUControl freine désormais le motoréducteur du dispositif de levage de manière à ce que le crochet de levage se déplace à la vitesse de levage lente immédiatement avant le point de commutation de la fin de course levage.