Se connecter dans KranOS avec
l'utilisateur « Abnahme » (réception) (niveau d'utilisateur [2]‚).
Voir « Connecter un
ordinateur portable ou une tablette à ABUControl ».
Se connecter dans KranOS avec
l'utilisateur « Abnahme » (réception) (niveau d'utilisateur [2]‚).
Voir « Connecter un
ordinateur portable ou une tablette à ABUControl ».Dans certaines situations (par exemple en cas d'un mauvaus réglage du capteur de distance), il peut être nécessaire de passer au-delà des points de commutation réglés du capteur de distance du pont ou du chariot de direction.
Pour cette étape de travail, un accès à KranOS via un ordinateur portable ou une tablette est requis. L'utilisateur « Abnahme » (réception) (niveau d'utilisateur [2]‚) doit être connecté.
|
Aperçu : navigation dans KranOS |
|
Utilisateur « Abnahme » (réception) à « Translation du pont » à « Capteurs de distance pour translation du pont » |
|
Utilisateur « Abnahme » (réception) à « Translation de chariot » à « Capteurs de distance pour translation du chariot » |
Se connecter dans KranOS avec
l'utilisateur « Abnahme » (réception) (niveau d'utilisateur [2]‚).
Voir « Connecter un
ordinateur portable ou une tablette à ABUControl ».
Dans le menu principal,
sélectionner le motoréducteur de chariot de direction ou le motoréducteur de
pont souhaité (par exemple Translation du chariot de direction 1 ou
Translation du pont).
● La fenêtre du motoréducteur souhaité apparaît.
 Dans le menu
« Réglages » (roue dentée sur fond jaune), cliquer sur l'option de
menu « Capteurs de distance pour translation du pont » (ou
« Capteurs de distance pour translation du chariot »).
Dans le menu
« Réglages » (roue dentée sur fond jaune), cliquer sur l'option de
menu « Capteurs de distance pour translation du pont » (ou
« Capteurs de distance pour translation du chariot »).
|
| |
|
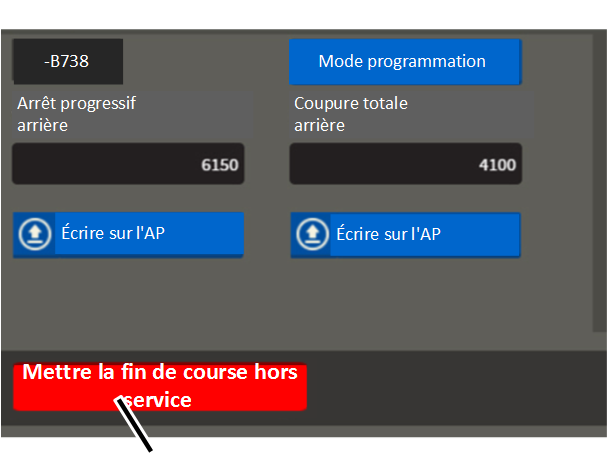
Bouton « Mettre la fin de course hors service » |
|
● La fenêtre « Capteurs de distance pour translation du pont » (ou « Capteurs de distance pour translation du chariot ») apparaît.
Cliquer sur le bouton
« Mettre la fin de course hors service ».
● Le bouton apparaît sur fond rouge.
● Les points de commutation actuellement sauvegardés pour l'arrêt progressif et la coupure totale sont désormais ignorés.
Le chariot de direction (le pont) peut alors être déplacé à de nouvelles positions quelconques.
● Après 1 minute, le contournement des fins de course est désactive automatiquement.