ABUControl consiste des éléments suivants :
─ Commande de pont
─ Commande de chariot de direction
─ Codeur absolu sur le mécanisme de levage
─ Système de mesure de charge sur le mécanisme de levage
─ Capteur de distance sur le chariot de direction ou les chariots de direction (en option)
─ Capteur de distance sur le pont (en option)
─ Autres limiteurs de mouvement (interrupteur à levier en croix et/ou cellules photoélectriques à reflexion) (en option)
─ Afficheur LED à matrice de points (en option)
─ Autres interrupteurs à levier en croix pour la commande de profil du bâtiment (en option)
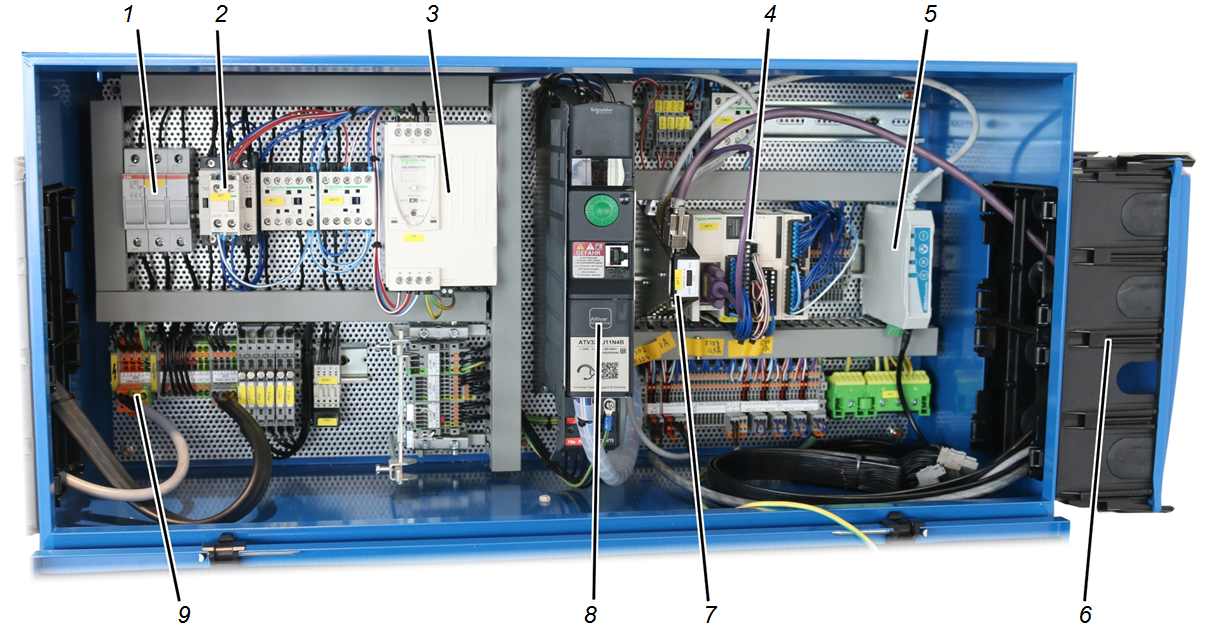
Vue complète de la commande de grue
La conception exacte varie en fonction du pont. L'illustration suivante vous aide à vous orienter.
|
|
─ 1 : Séparateur de sécurité
─ 2 : Contacteur principal
─ 3 : Bloc d'alimentation
─ 4 : Coupleur de bus de terrain pour signaux d'entrée et de sortie
─ 5 : Récepteur ABURemote
─ 6: Boîte de raccordement
─ 7 : Distributeur CAN
─ 8 : Variateur de fréquence
─ 9 : Alimentation
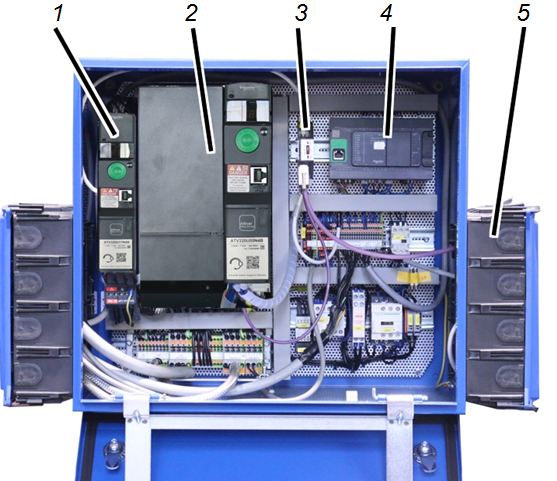
Vue d'ensemble de la commande de chariot de direction :
La conception exacte de la commande de chariot de direction varie en fonction du pont. L'illustration suivante vous aide à vous orienter.
|
|
─ 1 : Variateur de fréquence du motoréacteur du chariot de direction
─ 2 : Variateur de fréquence du mécanisme de levage
─ 3 : Distributeur CAN
─ 4 : Automate programmable
─ 5 : boîte de raccordement
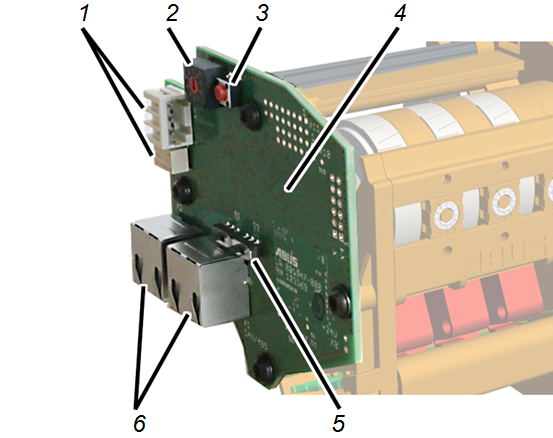
Codeur absolu « AWG » (sur le fin de course de réducteur « GGS ») :
|
|
─ 1 : relais et connecteur mâle pour tâches de commutation supplémentaires (option)
─ 2 : roue de réglage pour adresse d'équipement (option)
─ 3 : bouton-poussoir pour la réinitialisation de l'adresse d'équipement
─ 4 : platine
─ 5 : interrupteur de la résistance de terminaison
─ 6 : raccordement pour réseau de bus CAN et réseau Modbus
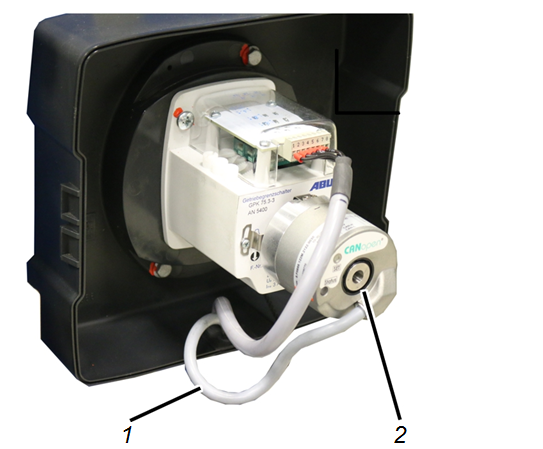
Codeur absolu « Kübler » (sur le fin de course de réducteur « GPK ») :
|
|
─ 1 : câble de bus CAN
─ 2 : codeur absolu « Kübler »