Fin de course levage bas
Fin de course levage haut
ABUControl :
─ ABUControl est une commande de pont modulaire basée sur des composants électroniques d'automatisation éprouvés. Les différents modules du pont sont interconnectés, formant une commande intelligente des fonctions de pont.
─ ABUControl utilise un automate programmable en tant qu'unité de calcul centrale. Elle évalue les commandes de la radiocommande ou de la boîte à boutons ainsi que toutes les signalisations de retour en provenance des codeurs absolus, limiteurs de mouvement (interrupteurs à levier en croix, cellules photoélectriques,...) et autres modules. Basé sur ce principe, ABUControl commande les motoréducteurs et motoréducteurs du dispositif de levage du pont.
─ Les axes de déplacement (translation du pont et translation du chariot de direction) sont équipés de variateurs de fréquence. Grâce à cela, ABUControl permet un réglage confortable des profils de mouvement. Sur demande, le mécanisme de levage peut également être équipé de variateurs de fréquence afin de permettre la sélection et le réglage des profils de levage également sur le mécanisme de levage.
─ La position du crochet du mécanisme de levage et la vitesse de levage sont détectées via un codeur absolu. Ainsi, ABUContol sait à quelle vitesse le mécanisme de levage fonctionne. Ceci permet l'utilisation de certaines fonctions supplémentaires confortables (par exemple la synchronisation du mécanisme de levage). De plus, les positions maximum supérieure et inférieure du crochet sont détectées par un fin de course de réducteur électromagnétique.
─ Un pont équipé du système ABUControl est commandé par une radiocommande ABURemote. Cela permet de commander en tout confort certaines fonctions supplémentaires (par ex. le contrôle de balancement de la charge) à partir de l'émetteur. Si le pont est commandé à l'aide d'une autre radiocommande, certaines fonctions (par ex. le contrôle de balancement de la charge) ne sont pas disponibles ou ne le sont que de façon limitée.
─ Uniquement avec boîte à boutons (option) : le pont peut également être commandé à l'aide d'une boîte à boutons. Avec une boîte à boutons, certaines fonctions d'ABUControl (par ex. le contrôle de balancement de la charge) ne peuvent pas être utilisées ou ne peuvent l'être que de façon limitée.
─ Uniquement avec treuil à câble (équipement en série) ou pont ou chariot de direction avec afficheur LED à matrice de points (option) : sur l'afficheur LED à matrice de points, différentes informations d'exploitation du système ABUControl sont affichées. De plus, l'afficheur signale au conducteur l'état des différents composants de pont, ce qui permet un dépannage rapide et simple.
─ Uniquement avec double vitesse de levage (option) : cette option permet d'augmenter (doubler) la vitesse de levage à jusqu'à 200%. Ceci permet de travailler plus rapidement avec le pont. La vitesse de levage maximale possible et supplémentaire (à partir de 100%) dépend de la charge suspendue.
─ Uniquement avec micro-vitesse (option, non disponible pour GM modulaire) : cette option permet de commuter le mécanisme de levage à une vitesse de levage particulièrement lente. Ceci permt un positionnement très précis de la charge. La micro-vitesse peut être activée ou désactivée à l'aide de la boîte à boutons.
KranOS :
─ KranOS est une interface utilisateur graphique destinée au réglage de la commande ABUControl.
─ À l'aide d'un ordinateur, le pontier et les techniciens d'entretien (formés) peuvent accéder à KranOS pour changer des réglages et afficher des données de fonctionnement.
─ Aucun logiciel spécial et aucune application spéciale ne sont nécessaires pour accéder à KranOS. L'accès s'effectue au moyen d'un navigateur Internet normal.
Câblage et programmation d'ABUControl :
─ ABUControl se compose d'une commande à mémoire programmable centrale (automate programmable) et de nombreux appareils bus CAN (par exemple des codeurs absolus, des variateurs de fréquence, etc.) qui interagissent via un réseau de bus CAN.
─ ABUControl est constitué des composants industriels standard modulaires qui peuvent être remplacés de manière simple et facile si nécessaire. Un remplacement de la copmmande complète n'est donc pas nécessaire en cas d'un défaut. Des composants individuels peuvent être remplacés de manière ciblée.
─ Tous les modules du système ABUControl sont interconnectés avec des connecteurs enfichables. Ceci permet de les séparer rapidement les uns des autres.
─ Chaque pont equipé d'ABUControl est paramétré en fonction du client. La commande connaît ainsi la configuration exacte du pont concerné et les composants en option.
─ Après un remplacement, les appareils bus CAN sont programmés par l'automate programmable central. Selon l'appareil, cela a lieu automatiquement ou à l'aide d'une fonction correspondante de KranOS.
─ Après un remplacement, l'automate programmable central doit être équipé de la programmation propre au client à l'aide d'une carte SD. Les données du pont propres au client sont ainsi conservées.
─ ABUControl a été développé en tenant compte des exigences CEM. Les perturbations par ondes électromagnétiques en provenance d'autres appareils et installations industrielles sont empêchées de manière efficace.
─ Les signaux de commande peuvent être contrôlés à l'aide d'appareils de mesure conventionnels au niveau des sorties et entrées de l'automate programmable central, des variateurs de fréquence et des coupleurs de bus de terrain.
─ Outre le réseau de bus CAN, certains composants sont reliés entre eux par un réseau Ethernet. Il s'agit entre autres d'un module sans fil qui crée un réseau WiFi pour établir une connexion entre un ordinateur portable ou une tablette et l'automate programmable. Si des appareils de réseau supplémentaires sont utilisés (par exemple un module de transmission radio), tous les appareils de réseau sont raccordés à un commutateur réseau en tant que distributeur.
Synchronisation de translation des chariots de direction :
─ Si plus d'un chariot de direction est utilisé sur le pont, ABUControl règle la translation synchrone de tous les chariots de direction en fonctionnement commun. Ainsi, les chariots de direction ont une vitesse de déplacement, un temps d'accélération et un temps de freinage identiques en mode de fonctionnement commun.
─ Grâce à la synchronisation de translation des chariots de direction, le transport d'une charge commune s'effectue de manière encore plus sécurisée.
─ La synchronisation de translation des chariots de direction fonctionne également si les chariots de direction ont différentes tailles et (considérés chacun séparément) différentes vitesses de déplacement maximales.
─ La
synchronisation de translation des chariots de direction est possible pour
jusqu'à trois chariots de direction par pont.
Fonctionnement en tandem :
la synchronisation de translation des chariots de direction est possible sur les
deux ponts fonctionnant en tandem, pour jusqu'à deux chariots de direction par
pont.
Synchronisation de translation des chariots de direction :
─ Si plus d'un mécanisme de levage et des variateurs de fréquence sont utilisés sur le pont, ABUControl règle le levage et la descente synchrones en fonctionnement commun. Ainsi, les mécanismes de levage ont une vitesse de levage, un temps d'accélération et un temps de freinage identiques en mode de fonctionnement commun.
─ Grâce à la synchronisation des mécanismes de levage, le transport d'une charge commune s'effectue de manière encore plus sécurisée.
─ La synchronisation des mécanismes de levage fonctionne également si les mécanismes de levage ont différentes tailles et (considérés chacun séparément) différentes vitesses de levage maximales.
─ La synchronisation compense les différences de charge des mécanismes de levage provoquées par une répartition inégale de la charge. Une charge répartie de manière inégale est donc levée et descendue de manière synchrone par tous les mécanismes de levage.
─ La
synchronisation des mécanismes de levage est possible pour jusqu'à trois
mécanismes de levage de direction par pont.
Fonctionnement en tandem :
la synchronisation de translation des mécanismes de levage est possible sur les
deux ponts fonctionnant en tandem, pour jusqu'à deux mécanismes de levage par
pont.
Profils de mouvement :
─ Pour les mécanismes d'entraînement à variateurs de fréquence, ABUControl permet d'adapter la commande aux mécanismes d'entraînement. En ce qui concerne le comportement d'accélération et de freinage ainsi que les vitesses maximales et minimales, le motoréducteur du dispositif de levage et les motoréducteurs peuvent ainsi être adaptés aux habitudes de l'utilisateur.
─ Les paramètres de réglage sont limités de manière à éviter que le pont soit être réglé au-delà des limites de sécurité. Une accélération trop forte risquerait de contraindre excessivement la charpente portante (bâtiment).
─ Dans la commande des profils de mouvement dans KranOS, il est possible de changer entre un profil de mouvement continu et un profil à deux niveaux.
─ Cela permet d'adapter les profils de mouvement de différents ponts afin d'obtenir un comportement similaire.
Limiteur de charge :
─ ABUControl détecte la charge accrochée de tous les mécanismes de levage et règle les limiteurs de charge de tous les mécanismes de levage individuels ainsi que la somme de la charge du pont. De plus, le système surveille le sens de rotation et le régime de tous les mécanismes de levage et arrête le mouvement de manière sûre en cas d'un surrégime.
─ ABUControl mesure la charge accrochée de manière directe.
─ Un système de mesure de charge est utilisé pour déterminer la charge. Il se compose d'un ou de deux capteurs de charge ou d'un axe de mesure.
─ Le système de mesure de charge sert avant tout à constater une surcharge du pont et non pas à peser exactement la charge suspendue. Même sur l'afficheur de charge de l'émetteur ou sur l'afficheur LED à matrice de points, l'affichage de la charge sert uniquement à une estimation approximative de la charge. Le système de mesure de charge ne peut pas être calibré. Le système de mesure de charge a une précision de +/- 2 jusqu'à 5 % de la capacité maximale du pont.
Commande de profil du bâtiment :
─ Le profil du bâtiment rassemble toutes les caractéristiques d'un bâtiment pouvant influencer la translation du pont, la translation du chariot de direction et le levage/la descente du pont. Parmi ces caractéristiques figurent le début et la fin du chemin de roulement, d'éventuels obstacles, les zones bloquées, les clapets de passage du pont et d'autres facteurs.
─ La commande de profil du bâtiment d'ABUControl permet d'adapter et de limiter tous les axes de mouvement du pont en fonction du profil du bâtiment. Il est par exemple possible de réduire la vitesse en approchant des obstacles ou d'effectuer des arrêts intermédiaires à cedrtaines positions. De plus, certaines zones peuvent être complètement bloquées, ou des zones de charge partielle peuvent être définies dans le bâtiment.
─ Si le pont est équipé d'une commande de profil du bâtiment, les points de commutation pour l'arrêt progressif ou la coupure totale du pont et du chariot de direction sont également intégrés au profil du bâtiment.
─ Des interrupteurs à levier en croix sont utilisés pour déterminer la position du pont et du chariot de direction.
─ Un codeur absolu est utilisé pour déterminer la position du mécanisme de levage.
Le contrôle de balancement de la charge :
─ Le contrôle de balancement de la charge réduit nettement le mouvement d'oscillation lors de la translation de chariot et la translation du pont.
─ Le contrôle de balancement de la charge est basé sur des calculs mathématiques. Les vitesses de déplacement du pont et du chariot de direction, la position du crochet ainsi que la distance entre le crochet de levage et le centre de gravité de la charge (et donc aussi la longueur des accessoires d'accrochage de charge) sont prises en compte. Les moteurs de déplacements horizontaux sont accélérés et freinés par ABUControl de manière à ce que le mouvement d'oscillation soit compensé et atténué.
─ Le contrôle de balancement de la charge peut être activé et désactivé via ABURemote. La valeur réglée pour la distance entre le crochet de levage et le centre de gravité de la charge peut être modifiée via ABURemote.
─ Le contrôle de balancement de la charge peut réduire le balancement par accélération et freinage uniquement grâce à des calculs mathématiques. Les influences extérieures comme par exemple le vent, un choc contre un obstacle ou d'autres facteurs ne peuvent pas être compensés.
─ Les courses d'accélération et de freinage du pont et du chariot de direction ne changent pas de façon significative sous l'effet du contrôle de balancement de la charge.
─ Le contrôle de balancement de la charge fonctionne d'abord
uniquement avec un seul mécanisme de levage ou avec un pont équipé de plusieurs
chariots de direction en commande individuelle lorsque le chariot de direction
non utilisé se trouve en position d'arrêt.
En cas de fonctionnement commun de
plusieurs chariots de direction ou en fonctionnement en tandem, le contrôle de
balancement de la charge doit être autorisé séparément. De plus, la radiocommande ABURemote doit être spécialement
configurée et les ponts et chariots de direction doivent être de même type.
Le contrôle de balancement de la charge fonctionne en fonctionnement commun de
plusieurs chariots de direction ou en fonctionnement en tandem uniquement si les
centres de gravité de la charge sont identiques sur les deux mécanismes de
levage, c'est-à-dire si la somme de la position du crochet et de la longueur des
accessoires d'accrochage de charge donnent la même longueur totale.
Sécurité anti-collision :
─ La sécurité anti-collision du pont et des chariots de direction évite que deux ponts (deux chariots de direction) ne de heurtent à une vitesse de déplacement rapide ou une vitesse de translation lente.
─ En fonction du cas d'application, la sécurité anti-collision utilise une cellule photoélectrique à réflexion ou un capteur de distance à rayon laser.
─ Les cellules photoélectriques à reflexion et les capteurs de distance peuvent réagir sensiblement à la poussière, à la neige ou aux particules qui se trouvent dans l'air. Si le rayon lumineux ou le rayon laser est interrompu, le pont ou le chariot de direction freine et s'arrête.
Marche tandem :
─ La marche tandem permet de commander simultanément et avec un seul émetteur deux ponts roulants transportant une charge commune.
─ La marche tandem fonctionne en combinaison avec la synchronisation. ABUControl régule la translation du chariot de direction et la translation du pont snychrones lors du fonctionnement en tandem ainsi que le levage synchrone (en option). Les ponts présentent alors, dans des tolérances serrées, la même vitesse, le même temps d'accélération et le même temps de freinage sur les axes de mouvement du pont.
─ Grâce à la marche tandem, le transport d'une charge commune s'effectue de manière encore plus sécurisée.
─ La marche tandem fonctionne également si les ponts possèdent différentes capacités maximales et (considérés chacun séparément) différentes vitesses maximales.
─ Avec la marche tandem, il est possible de soulever des charges qui dépassent la capacité maximale d'un seul pont ou du système de ponts. Étant donné que la charge sollicite les deux ponts, la capacité maximale des deux ponts peut être additionnée, aussi bien pour des ponts à capacité maximale identique que pour des ponts à capacité maximale différente. Lors d'une répartition inégale de la charge, la capacité maximale totale est par conséquent plus faible.
─ Les paramètres correspondants (ex. : « Temps d'accélération », « Temps de freinage » et « Vitesse Maximum ») sont alors comparés entre les deux ponts et, si possible, harmonisés de manière à ce que les deux ponts soient compatibles. Les profils de translation doivent être réglés de façon identique sur les deux ponts (ex : réglage « Continu »).
─ Entre autres, tous les fins de course de translation du pont et du chariot de direction, les fins de course de levage et le limiteur de charge sont évalués de manière commune. Lorsqu'un pont s'arrête sur un des axes de mouvement, l'autre pont s'arrête sur le même axe. Les autres axes de mouvement peuvent être parcourus sans arrêt intermédiaire.
Guidage électronique (option) :
─ Le guidage électronique peut réduire les charges unilatérales et l'usure des joues de galet. Par exemple, ces effets peuvent se produire si un chariot de direction portant une charge au crochet est positionné à l'extrémité gauche ou droite de la poutre principale et que le pont se trouve en translation.
─ Pour contrer cet effet, la distance entre les deux galets d'un sommier et le rail du chemin de roulement est mesurée. Si le pont se déplace en biais, ABUControl compense automatiquement en réglant les motoréducteurs des deux sommiers de manière différente.
─ Ceci permet de réduire nettement l'usure des joues de galet et du chemin de roulement.
Le fin de course du réducteur :
|
Fin de course levage bas |
|
|
| |
|
|
Fin de course levage haut |
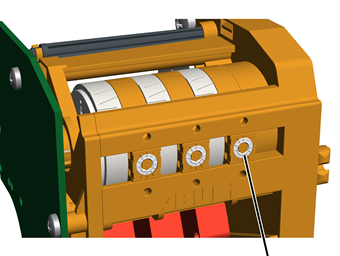
─ Le treuil à câble possède un fin de course de réducteur qui sert de fin de course de levage mécanique. Il est directement couplé au tambour à câble. Il garantit que le crochet de levage ne dépasse pas la position la plus haute ni la position la plus basse du crochet.
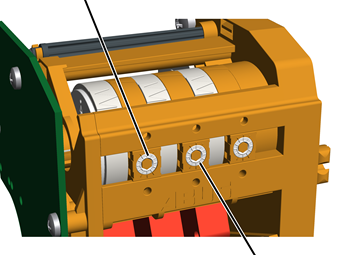
─ Le point de commutation supérieur s'appelle « Fin de course levage haut » (vis de réglage centrale), le point de commutation inférieur s'appelle « Fin de course levage bas » (vis de réglage gauche).
─ Juste avant que le crochet de levage n'atteigne le point de commutation d'un fin de course levage, ABULiner freine lentement le moteur de levage. Les points de commutation de la fin de course levage ne sont alors actionnés qu'à une vitesse de levage lente.
|
|
| |
|
| ||
|
|
Fin de course levage de secours | |
─ Afin de renforcer encore la sécurité, le fin de course de réducteur dispose d'un autre point de commutation. Il s'agit du « fin de course levage de secours » (vis de réglage droite). Il se situe au-dessus du fin de course levage haut et sert de point de commutation supplémentaire lors du levage.
─ Si la fin de course levage haut est défaillante et que le crochet de levage dépasse le point de commutation de la fin de course levage haut, ABUControl arrête le pont entier. Le fin de course levage de secours est réglé et plombé en usine.
Le fin de course de réducteur sans engagement du fin de course levage haut en exploitation :
─ Le fin de course levage haut ne doit pas être engagé en exploitation. S'il est engagé, le crochet de levage s'arrête au niveau du point de commutation du fin de course levage haut . Le point de commutation du fin de course levage de secours se trouve au-dessus du point de commutation du fin de course levage haut et ne peut donc pas être actionné en situation normale.
─ Si le fin de course de levage est mal réglé ou en cas de défaut technique, il se peut que le fin de course levage de secours soit tout de même actionné. Dans ce cas, le fin de course levage de secours doit être contourné pour permettre la remise en marche du pont.
Le fin de course de réducteur avec engagement du fin de course levage haut en exploitation :
─ Si la position la plus haute du crochet doit être engagée en exploitation, le fin de course levage haut est sollicité plus fréquemment et peut donc tomber en panne. Dans ce cas, le fin de course levage de secours assure l'immobilisation sûre du pont. Pour pouvoir contrôler régulièrement le fin de course levage de secours, le treuil à câble dispose d'un interrupteur à garrot qui permet de contourner manuellement le fin de course levage haut et de remettre en marche le pont manuellement après le contrôle du fin de course levage de secours.
|
|
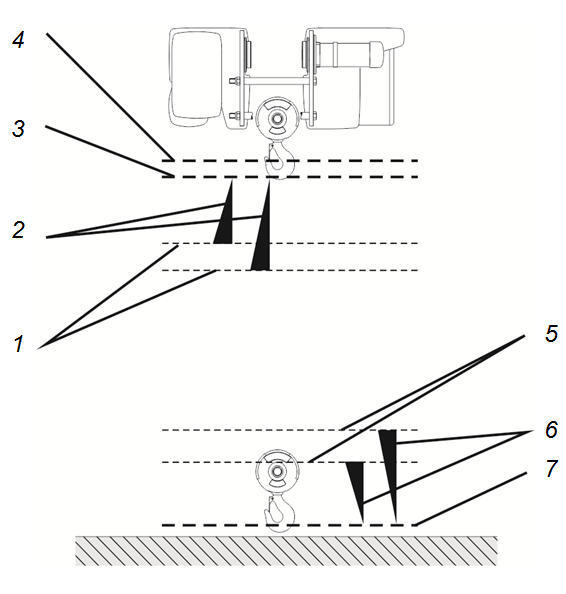
─ 1 : Juste avant la position la plus haute du crochet, ABUControl engage la phase de freinage du motoréducteur du dispositif de levage. Chaque fois, ABUControl calcule individuellement à quel point la phase de freinage commence, en fonction de la vitesse de levage actuelle. Si le crochet de levagem monte trop rapidement, la phase de freinage commence plus tôt. Si le crochet de levage monte plus lentement, la phase de freinage commence plus tard.
─ 2 : Phase de freinage. La force/souplesse de la phase de freinage peut être réglée dans KranOS.
─ 3 : point de commutation du fin de course levage haut. S'il est actionné, le crochet de levage s'arrête. Dû au début individuel et à la force réglable de la phase de freinage, le crochet de levage monte à une vitesse de levage réduite lorsqu'il s'approche du fin de course levage haut.
─ 4 : Point de commutation de la fin de course levage de secours. Si celui-ci est actionné, ABUControl désactive l'ensemble du pont.
─ 5 : Début de la phase de freinage, calculé chaque fois individuellement en fonction de la vitesse de levage actuelle.
─ 6 : phase de freinage.
─ 7 : Point de commutation de fin de course levage bas.
Le pronostic de l'état d'usure :
─ Le pronostic de l'état d'usure d'ABUControl sert au calcul de l'état d'usure nécessitant le remplacement du câble. Il calcule l'usure du câble et aide l'examinateur à effectuer le contrôle régulier en indiquant les tronçons de câble présentant l'usure la plus importante.
─ L'usure du câble du treuil à câble est principalement due aux flexions alternées. Il s'agit là du nombre de flexions qu'effectue un certain tronçon de câble au cours du temps sur les différentes poulies du moufle inférieur et de la traverse de la poulie de renvoi ainsi que sur le tambour à câble.
Outre le nombre de flexions alternées d'un tronçon de câble, le poids de la charge actuellement suspendue a également une influence importante sur l'apparition ou la non-apparition (lors d'une flexion alternée) de fils cassés dans le tronçon de câble actuellement fléchi.
─ ABUControl calcule en cours de fonctionnement à quel endroit se trouve actuellement chaque tronçon de câble. Pour les tronçons de câble qui sont en train de passer sur une poulie ou de la quitter, la charge suspendue est prise en compte comme facteur et l'usure correspondante est mémorisée pour ce tronçon de câble (et ajoutée aux valeurs déjà mémorisées).
─ Le calcul de l'état d'usure nécessitant le remplacement du câble ne remplace pas le contrôle régulier ni le contrôle du câble par le pontier au début des travaux. Il ne rallonge pas non plus les intervalles entre deux contrôles réguliers. Les dommages extérieurs (par ex. les dégâts mécaniques dus à des frottements du câble contre un objet) ne sont pas pris en compte.