Grúa (oscuro) y segunda grúa (claro) en funcionamiento tándem 'BC'
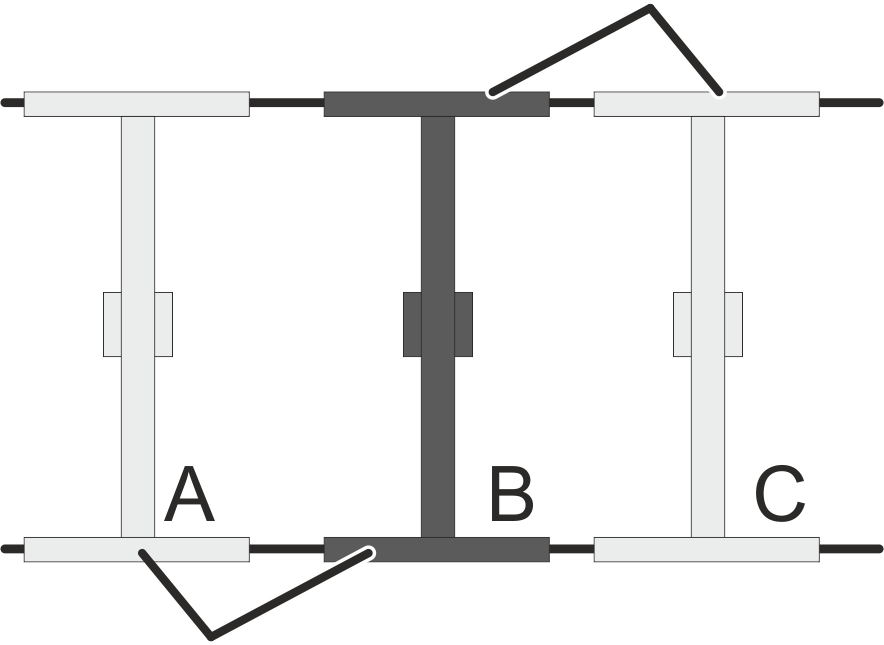
Grúa (oscuro) y segunda grúa (claro) en funcionamiento tándem 'AB'
Emisor y receptor de ABURemote deben estar ajustados a la misma dirección para que se puedan comunicar.
En una grúa con mando tándem debe guardarse en ABUControl (en el PLC y en el receptor de ABURemote) la dirección del receptor ABURemote de la segunda grúa. Esto es necesario para que el emisor de ABURemote pueda registrarse para el funcionamiento tándem en la grúa y en la segunda grúa a la vez.
Según el mando tándem, la grúa tendrá una o dos segundas grúas para las que hay que registrar la dirección del receptor.
|
|
Grúa (oscuro) y segunda grúa (claro) en funcionamiento tándem 'BC' | |
|
| ||
|
Grúa (oscuro) y segunda grúa (claro) en funcionamiento tándem 'AB' |
| |
Cuando cambia la dirección del receptor en la segunda grúa, por ejemplo porque se ha cambiado el receptor ABURemote en la segunda grúa o cuando se instala un mando tándem con posterioridad, hay que determinar y registrar de nuevo la dirección almacenada.
Este paso debe repetirse también en la segunda grúa, donde la perspectiva antes mostrada se aplica igual (grúa es B, segunda grúa es A o C).
Para este paso de trabajo es necesario un acceso a KranOS desde un portátil o una tableta. Debe estar con sesión iniciada como "Abnahme" (aprobación) (nivel de usuario [2]‚) o "Service" (servicio) (nivel de usuario [1]).
|
Vista general: Navegación en KranOS |
|
Usuario 'Service' o 'Abnahme' à "Perfil de movimiento" A partir de la versión del programa 1.2.0.1 |
 Iniciar sesión como "Service"
(servicio) (nivel de usuario [1]) o "Abnahme" (aprobación) (nivel de usuario
[2]) en KranOS. Véase Conectar el portátil o la
tableta al ABUControl.
Iniciar sesión como "Service"
(servicio) (nivel de usuario [1]) o "Abnahme" (aprobación) (nivel de usuario
[2]) en KranOS. Véase Conectar el portátil o la
tableta al ABUControl.
 En la ventana de inicio: en el menú "Ajustes" (rueda dentada sobre
fondo amarillo), hacer clic en el punto de menú "Perfil de movimiento".
En la ventana de inicio: en el menú "Ajustes" (rueda dentada sobre
fondo amarillo), hacer clic en el punto de menú "Perfil de movimiento".
|
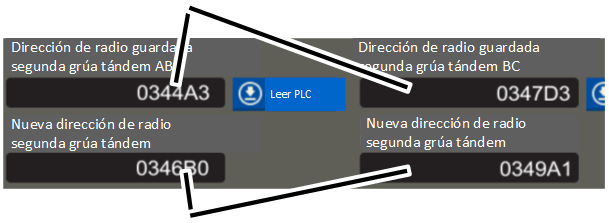
Dirección actual de receptor almacenada de la segunda grúa |
|
|
| |
|
Dirección de receptor de la segunda grúa determinada de nuevo |
|
● Aparece la ventana "Perfil de movimiento".
● En la línea superior se indica qué dirección de receptor se ha guardado para la segunda grúa.
Clicar en "Leer PLC".
● ABUControl se conecta por medio del módulo de transmisión de datos con la segunda grúa y determina la dirección del receptor de ABURemote.
● La dirección determinada del receptor de la segunda grúa se muestra en la línea inferior.
● Cuando la dirección actualmente guardado de la segunda grúa (línea superior) y la nueva dirección detectada de la segunda grúa (línea inferior) son distintas, se guarda la nueva dirección en el PLC.
● El mando tándem queda entonces temporalmente desactivado. Las grúas solo pueden accionarse solo de forma independiente.
Desconectar la grúa por el
interruptor de conexión a la red o interruptor de desconexión de la red.
Esperar 60 segundos.
Volver a conectar la grúa.
● El ABUControl se vuelve a poner en marcha.
● Además, durante el nuevo arranque, se procesa la nueva dirección de la segunda grúa y se transfiere al receptor de ABURemote.
● El mando tándem vuelve a estar operativo y puede seguir utilizándose.