El ABUControl consta de:
─ Mando de la grúa
─ Mando del carro
─ Codificador absoluto en el polipasto
─ Sistema de medición de cargas en el polipasto
─ Sensor de distancia en el carro o los carros (opcional)
─ Sensor de distancia en la grúa (opcional)
─ Otros limitadores de desplazamiento (interruptor de cruceta y/o fotocélula de reflexión) (opcional)
─ Indicador LED matricial (opcional)
─ Interruptores de cruceta adicionales para control de perfil de nave (opcional)
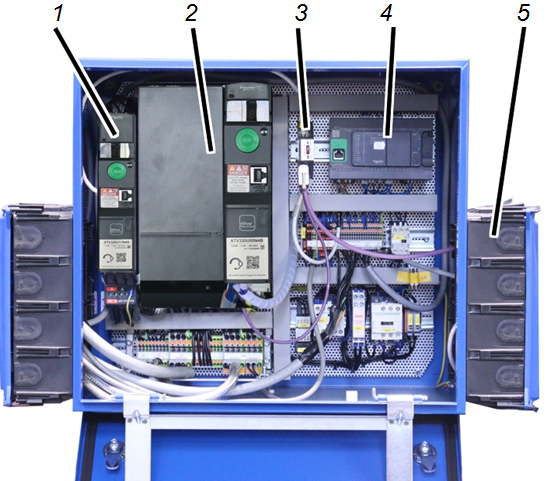
Vista general del mando de la grúa:
El mando de la grúa varía según el tipo de grúa en el que se instala. La imagen siguiente sirve a modo de orientación.
|
|
─ 1: Interruptor seccionador de fusibles
─ 2: Contactor principal
─ 3: Fuente de alimentación
─ 4: Acoplador de bus de campo para señales de entrada y salida
─ 5: Receptor del ABURemote
─ 6: Carcasa de brida
─ 7: Distribuidor de señales CAN
─ 8: Convertidor de frecuencia
─ 9: Alimentación
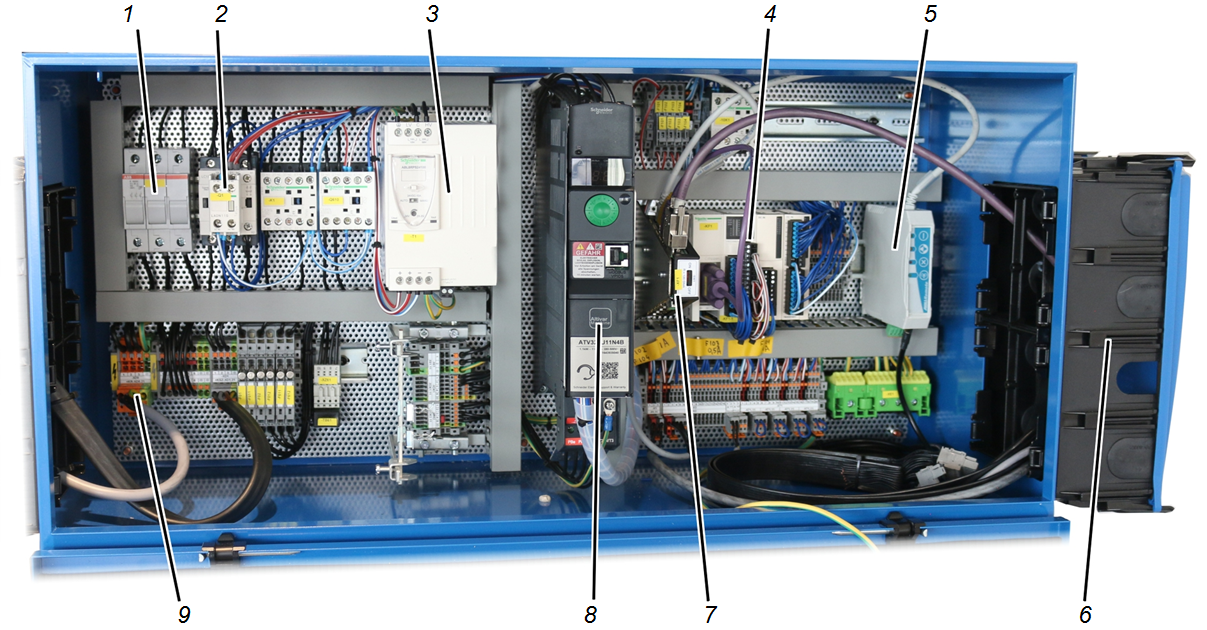
Vista general del mando del carro:
El mando del carro varía según el tipo de carro en el que se instala. La imagen siguiente sirve a modo de orientación.
|
|
─ 1: Convertidor de frecuencia del motor de carro
─ 2: Convertidor de frecuencia del polipasto
─ 3: Distribuidor de señales CAN
─ 4: PLC
─ 5: Carcasa de brida
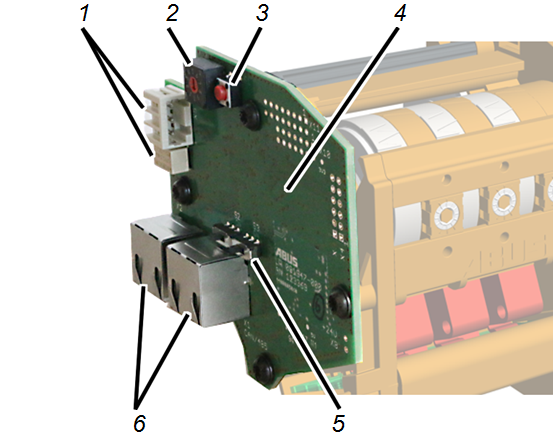
Codificador absoluto 'AWG' (en el interruptor de fin de engranaje 'GGS'):
|
|
─ 1. Relés y regleta de machos para funciones adicionales de conmutación (opción)
─ 2. Rueda de ajuste para la dirección del dispositivo (opción)
─ 3. Botón para reiniciar la dirección del dispositivo
─ 4. Platina
─ 5. Conmutador de la resistencia de terminación
─ 6. Conexión para la red CAN-Bus y la red Modbus
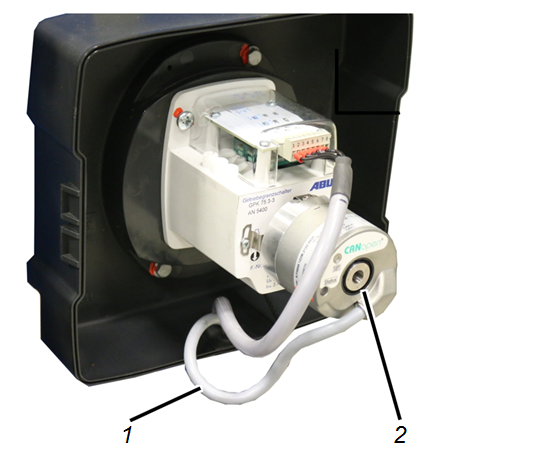
Codificador absoluto 'Kübler' (en interruptor de fin de engranaje 'GPK'):
|
|
─ 1: Línea CAN-Bus
─ 2: Codificador absoluto 'Kübler'