Limitador de carrera abajo
Limitador de carrera arriba
ABUControl:
─ ABUControl es un mando de grúa modular basado en componentes electrónicos de alta calidad de la tecnología de automatización. Los distintos módulos están enlazados entre sí y ofrecen un mando inteligente de las funciones de la grúa.
─ El ABUControl trabaja con un PLC como ordenador central. Analiza las órdenes de mando del mando a distancia por radio o botonera, así como todas las respuestas de los codificadores absolutos, limitadores de desplazamiento (interruptor de cruceta, fotocélula,...) y otros módulos. Basado en esta información, ABUControl controla los mecanismos de traslación y los de elevación de la grúa.
─ Los ejes de desplazamiento (traslación de la grúa y traslación del carro) van equipados con convertidores de frecuencia. Con ellos, el ABUControl puede realizar ajustes cómodos de los perfiles de control de movimiento. Sobre demanda se puede equipar el polipasto con convertidor de frecuencia para poder seleccionar y ajustar perfiles de elevación en el polipasto.
─ La posición del gancho del polipasto y la velocidad de elevación se registran con un codificador absoluto. Así sabe ABUControl con qué velocidad gira el polipasto. Esto permite una serie de cómodas funciones adicionales (como regulación de sincronización del polipasto). La posición del gancho más alta y más baja se registran adicionalmente mediante un interruptor de fin de engranaje electromecánico.
─ Una grúa equipada con ABUControl se maneja con un mando a distancia por radio ABURemote. Con éste pueden utilizarse algunas funciones adicionales (como control de la oscilación) cómodamente desde el emisor. Si la grúa se controla con otro tipo de mando a distancia, las funciones (como la de control de la oscilación) pueden no estar disponibles, o solo de forma limitada.
─ Solo con botonera (opcional): La grúa puede controlarse también con una botonera. Pero con una botonera no se pueden usar, o lo estarán de forma limitada, algunas de las funciones del ABUControl (como control de la oscilación).
─ Solo con polipasto de cable GM modular (equipamiento de serie) o con grúa o carro con indicador LED matricial (opcional): En el indicador LED matricial se muestran distintas informaciones de servicio del ABUControl. También informa sobre mensajes de estado de los distintos componentes de la grúa, facilitando así una rápida y sencilla subsanación de fallos.
─ Solo con doble velocidad de elevación (opcional): Con esta opción se puede aumentar la velocidad de elevación en hasta un 200 % (=duplicarla). De esta forma se puede trabajar más rápido con esta grúa. La velocidad de elevación adicional máxima permitida (a partir del 100 %) depende de la carga que haya suspendida.
─ Solo con velocidad de alta precisión (opcional, no disponible con GM modular): Con esta opción se puede conmutar el polipasto a una velocidad de elevación especialmente lenta. C on ello se consigue un posicionamiento extremadamente preciso de la carga. a velocidad de alta precisión puede conectarse y desconectarse en el emisor o en la botonera.
KranOS:
─ KranOS es una superficie gráfica de usuario con la que se programa el ABUControl.
─ El operario y el personal de mantenimiento (formado) pueden acceder a KranOS con una computadora (por ejemplo un portátil o una tableta), realizar allí ajustes y ver el registro de datos de servicio.
─ Para el acceso a KranOS no se requiere ningún software o App especial. El acceso se realiza mediante un navegador convencional de Internet.
El cableado y la programación del ABUControl:
─ El ABUControl consta de un mando central programable (PLC) y de múltiples dispositivos CAN-Bus (como codificador absoluto, convertidor de frecuencia, etc.), que se comunican entre sí a través de una red CAN-Bus.
─ El ABUControl consta de componentes industriales estándar modulares, que pueden ser fácilmente sustituidos por separado cuando sea necesario. En caso de fallo no es necesario sustituir el mando completo. Pueden sustituirse solo los componentes dañados.
─ Todos los módulos del ABUControl se interconectan mediante conexión por enchufe. E sto permite la separación rápida de los módulos entre sí.
─ cada grúa con ABUControl va parametrizada específicamente para el cliente. El mando conoce así la dimensión exacta de la grúa y sus componentes opcionales instalados.
─ Los dispositivos CAN-Bus son programas automáticamente por el PLC central tras una sustitución. Según dispositivo se realiza automáticamente o con una función especial en KranOS.
─ Tras una sustitución, el PLC central debe equiparse con la programación específica del cliente mediante una tarjeta SD. De esta forma se conservan los datos específicos de cada grúa.
─ El ABUControl ha sido diseñado desde un principio según el concepto de compatibilidad electromagnética. Con ello se impide cualquier interferencia por ondas electromagnéticas en otros dispositivos o instalaciones industriales.
─ En las entradas y salidas del PLC central, de los convertidores de frecuencia y de los acopladores de bus de campo se pueden medir las señales de mando con dispositivos convencionales de medición.
─ Adicionalmente a la red CAN-Bus hay algunos componentes conectados entre sí mediante una red Ethernet. Entre otros puede ser un módulo WLAN, que crea una red WLAN para que se establezca la comunicación por red inalámbrica entre un portátil o una tableta con el PLC. Si se utilizan dispositivos Ethernet adicionales (como un módulo de transmisión de datos), los dispositivos Ethernet se conectan a un Switch Ethernet como distribuidor.
La regulación de sincronización en traslación del carro:
─ Con más de un carro en la grúa, el ABUControl regula la marcha sincronizada de todos los carros en mando conjunto. Con este mando conjunto, los carros tienen velocidad de traslación, tiempo de aceleración y tiempo de frenado iguales.
─ Con la regulación de sincronización en traslación del carro, el transporte de una carga conjunta es aún más seguro.
─ La regulación de sincronización en traslación del carro funciona también cuando los carros son de tamaño distinto y (vistos por separado) tienen distintas velocidades máximas de traslación.
─ La
regulación de sincronización en traslación del carro funciona con hasta un
máximo de tres carros por grúa.
Con funcionamiento tándem: Puede haber
regulación de sincronización en traslación del carro en ambas grúas en
funcionamiento tándem hasta un máximo de dos carros por grúa.
La regulación de sincronización en el polipasto:
─ Con más de un polipasto en la grúa y con convertidores de frecuencia, ABUControl regula la elevación y el descenso sincronizados en mando conjunto. Con este mando conjunto, los polipastos tienen velocidad de elevación, tiempo de aceleración y tiempo de frenado iguales.
─ Con la regulación de sincronización en polipastos, el transporte de una carga conjunta es aún más seguro.
─ La regulación de sincronización en polipastos funciona también cuando los polipastos son de tamaño distinto y (vistos pos separado) tienen distintas velocidades máximas de elevación.
─ La regulación de sincronización equilibra también distintas cargas de los polipastos debido a una distribución desigual de la carga. De esta forma, una carga desigualmente distribuida puede ser izada y bajada por todos los polipastos de forma sincronizada.
─ La
regulación de sincronización en polipastos funciona con hasta un máximo de tres
polipastos por grúa.
Con funcionamiento tándem: Puede haber regulación de
sincronización en polipastos en ambas grúas en funcionamiento tándem hasta un
máximo de dos polipastos por grúa.
Los perfiles de control de movimiento:
─ En accionamientos con convertidores de frecuencia: ABUControl permite una adaptación del mando de los accionamientos. De esta forma, el motor de elevación y los mecanismos de traslación se pueden adaptar en su comportamiento de aceleración y frenada, así como en su velocidad máxima y mínima, a las propias costumbres.
─ Los parámetros para el ajuste están tan limitados, que la grúa solo puede configurarse dentro de límites seguros. Caso contrario, una aceleración excesiva podría poner, por ejemplo, en peligro la estructura portante (edificio).
─ En el control de perfil de movimiento en KranOS se puede conmutar entre un perfil de movimiento sin escalas o uno de dos etapas.
─ Con ello pueden sincronizarse entre sí distintas grúas en sus perfiles de movimiento para lograr un comportamiento similar.
El seguro de sobrecarga:
─ ABUControl capta la carga suspendida en todos los polipastos y asume el seguro de sobrecarga de todos los polipastos individuales y el sumatorio de cargas de la grúa. También supervisa el sentido de giro y la velocidad de todos los polipastos, y en caso de un exceso de velocidad desconecta con seguridad el sistema.
─ ABUControl mide directamente la carga suspendida.
─ Para la medición de la carga se utiliza un sistema de medición de cargas. Consta de uno o dos sensores de carga o de un perno de medición.
─ El sistema de medición de cargas sirve, ante todo, para determinar una sobrecarga en la grúa y no tanto para el pesaje exacto de una carga suspendida. Incluso si hay un indicador de carga en el emisor o un indicador LED matricial, esta indicación solo ofrece un pesaje aproximado de la carga. El sistema de medición de cargas no puede calibrarse. El sistema de medición de cargas tiene una precisión de +/- 2 a 5 % de la capacidad de carga máxima de la grúa.
El control de perfil de nave:
─ El perfil de la nave incluye todas las características de una nave que pueden influir en la traslación de la grúa y del carro y en la elevación y descenso del gancho. Entre ellas están el principio y final de la vía de la grúa, obstáculos, zonas bloqueadas, puertas para el paso de la grúa y similares.
─ El control de perfil de la nave del ABUControl permite adaptar y limitar todos los ejes de la grúa según el perfil de la nave. Se puede, por ejemplo, reducir la velocidad frente a obstáculos, o programar una para intermedia en determinadas posiciones. También pueden bloquearse determinadas zonas para que no sean cruzadas o determinar zonas de carga limitada en una nave.
─ Si la grúa va equipada con un control de perfil de nave, también se integran en él los puntos de conmutación para desconexión previa y final de grúa y carro.
─ Para detectar la posición de grúa y carro se utilizan interruptores de cruceta.
─ Para determinar la posición del polipasto se utiliza un codificador absoluto.
El control de la oscilación:
─ El control de la oscilación reduce notablemente el movimiento oscilatorio del gancho durante la traslación de la grúa y del carro.
─ El control de la oscilación se basa en cálculos matemáticos. Se consideran aquí las velocidades de traslación de grúa y carro, la posición del gancho y la distancia desde el gancho hasta el centro de gravedad de la carga (por lo tanto también la longitud del elemento de sujeción). Los motores de traslación se aceleran y frenan desde el ABUControl de forma que el movimiento de traslación contrarresta el movimiento oscilatorio amortiguándolo.
─ El control de la oscilación puede conectarse y desconectarse a través de ABURemote. El valor ajustado para la distancia desde el gancho hasta el centro de gravedad de la carga puede modificarse en ABURemote.
─ El control de la oscilación solo puede reducir la oscilación con cálculos matemáticos mediante aceleraciones y frenadas. No se pueden compensar influencias externas como viento, choque contra un obstáculo o sucesos similares.
─ Los recorridos de aceleración y frenada de grúa y carro no varían mucho por el control de la oscilación.
─ El control de la oscilación funciona primero solo con un único
polipasto o con una grúa con varios carros en control individual, cuando el
carro no utilizado está en posición de aparcado.
En mando conjunto de varios
carros o en funcionamiento tándem, el control de la oscilación debe activarse
por separado. Además, el mando a distancia por radio
ABURemote debe configurarse aquí especialmente, y grúas y carros deben ser del
mismo diseño. La amortiguación de oscilación solo funciona en el mando
conjunto de varios carros o en funcionamiento tándem, cuando los centros de
gravedad de la carga sean iguales en ambos polipastos, es decir cuando la
posición del gancho y la longitud del elemento de sujeción, sumados, den la
misma longitud total.
La protección anticolisión:
─ La protección anticolisión en grúa y carros impide que dos grúas (o dos carros) puedan chocar entre sí a velocidad rápida o a velocidad lenta de traslación.
─ La protección anticolisión funciona según el caso de aplicación mediante una fotocélula de reflexión o un sensor de distancia con láser.
─ Las fotocélulas de reflexión y los sensores de distancia pueden reaccionar ante influencias del entorno como polvo, nieve o partículas suspendidas en el aire. Si se interrumpe el haz de luz o de láser, la grúa o el carro frenará y se parará.
La regulación tándem:
─ Con la regulación tándem se pueden controlar dos puentes grúa con una carga conjunta al mismo tiempo con un solo emisor.
─ La regulación tándem trabaja en combinación con la regulación de sincronización. ABUControl regula la traslación sincronizada de carro y de grúa en funcionamiento tándem, así como la elevación sincronizada (opcional). Con ello, las grúas tienen en sus ejes velocidad, tiempo de aceleración y tiempo de frenado iguales, con muy estrechas tolerancias.
─ Con la regulación tándem, el transporte de una carga conjunta es aún más seguro.
─ La regulación tándem funciona también cuando las grúas tienen capacidades de carga máxima distintas y velocidades máximas (vistas por separado) distintas.
─ Con la regulación tándem se pueden elevar cargas que superan la capacidad máxima de carga de una grúa o instalación de grúa independiente. Ya que la carga actúa sobre ambas grúas, puede sumarse la capacidad de carga máxima de ambas grúas, tanto con grúas de igual capacidad como con grúas de capacidad distinta. Con una distribución desigual de la carga en los ganchos, la capacidad de carga máxima se reducirá.
─ Se comparan los parámetros correspondientes (como "tiempo de aceleración", "tiempo de frenado" y "velocidad máxima") entre las dos grúas y se equilibran dentro de lo posible para que ambas grúas sean compatibles. Los perfiles de traslación de ambas grúas deben estar ajustadas de forma idéntica (por ejemplo "sin escalas").
─ Con ello se valoran, entre otros, todos los interruptores de fin de recorrido de grúa y carro, interruptores fin de carrera de elevación y seguros de sobrecarga conjuntamente. Si la grúa se para en uno de sus ejes, también parará la otra grúa en el mismo eje. Los demás ejes de grúa pueden continuar desplazándose sin parada intermedia.
El guiado electrónico por el carril (opcional):
─ El guiado electrónico por el carril puede reducir cargas unilaterales así como el desgaste de las pestañas de rueda. Estos se dan cuando, por ejemplo, el carro con carga en el gancho se para en el extremo derecho o izquierdo de la viga principal y la grúa continúa.
─ Para ello se mide la distancia de ambas roldanas de un testero respecto al carril de la grúa. Si la grúa se traslada torcida (por ejemplo por carga en un solo lado), el ABUControl lo compensa automáticamente mediante una regulación distinta de los accionamiento de traslación de ambos testeros.
─ Así se reduce claramente el desgaste de las pestañas de rueda y de la vía de grúa.
El interruptor de fin de engranaje:
|
Limitador de carrera abajo |
|
|
| |
|
|
Limitador de carrera arriba |
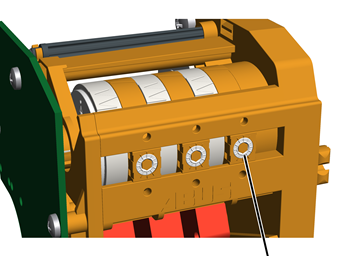
─ El polipasto de cable tiene un interruptor de fin de engranaje que funciona como interruptor fin de carrera de elevación. Está directamente acoplado con el tambor de cable. Se encarga de que el gancho no supere la posición más alta o más baja permitida para el gancho.
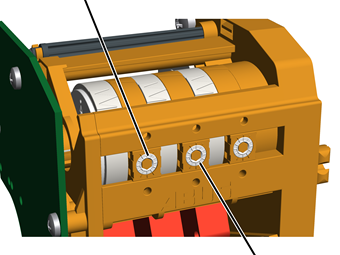
─ El punto superior de conmutación se llama "fin de carrera superior" (tornillo central de graduación), y el inferior "fin de carrera inferior" (tornillo de graduación izquierdo).
─ Justo antes de que el gancho alcance el punto de conmutación de un fin de carrera, el ABUControl frena lentamente el motor de elevación. De esta forma, los puntos de conmutación del fin de carrera se accionan así solo a velocidad de precisión.
|
|
| |
|
| ||
|
|
Limitador de carrera de seguridad | |
─ Para mejorar aún más la seguridad, el interruptor de fin de engranaje cuenta con un punto de conmutación adicional. Se llama "final de carrera de seguridad" (tornillo de graduación derecho). Se encuentra por encima del fin de carrera superior y sirve como punto de conmutación adicional en elevación.
─ Si el fin de carrera superior fallara y el gancho superara el punto de conmutación del fin de carrera superior, ABUControl desconectará la grúa completa. El final de carrera de seguridad viene ajustado de fábrica y está precintado.
El interruptor de fin de engranaje sin activación en servicio del fin de carrera superior:
─ El fin de carrera superior no debe accionarse con frecuencia en servicio. Si se acciona, el gancho queda parado arriba en el punto de conmutación del fin de carrera superior. El punto de conmutación del fin de carrera de seguridad está por encima del punto de conmutación del fin de carrera superior por lo que no debe ser accionado en funcionamiento normal.
─ Si el fin de carrera superior está mal ajustado o está defectuoso, puede suceder que aún así se active el fin de carrera de seguridad. Entonces hay que puentear el fin de carrera de seguridad para poder reconectar la grúa. Véase "Liberar el fin de carrera de seguridad" en página 78.
El interruptor de fin de engranaje con activación en servicio del fin de carrera superior:
─ Si durante el servicio hay que subir el gancho hasta su posición más alta, el fin de carrera superior es accionado con mayor frecuencia y podría fallar. En este caso, el final de carrera de seguridad se encarga de que la grúa se pare con seguridad. Para poder comprobar regularmente el final de carrera de seguridad, el polipasto de cable tiene un interruptor basculante con el que se puede puentear manualmente el fin de carrera superior y volver a conectar la grúa manualmente una vez comprobado el funcionamiento del final de carrera de seguridad.
|
|
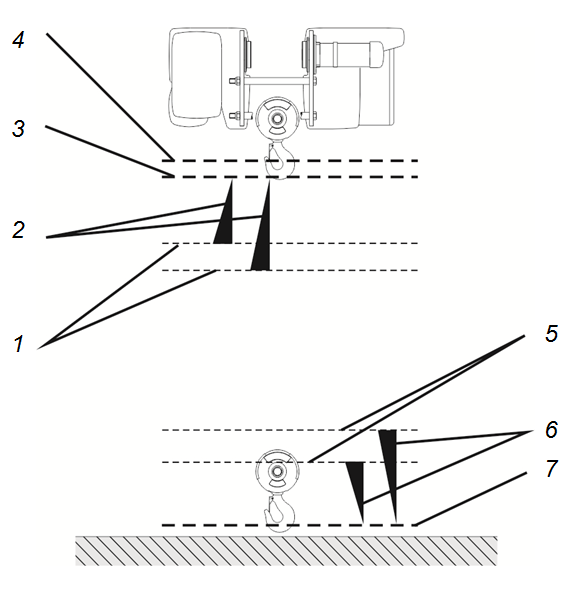
─ 1: Poco antes de la posición más alta del gancho comienza ABUControl la fase de frenado del motor de elevación. ABUControl calcula cada vez de forma individual en qué punto se inicia la fase de frenado, según la velocidad de elevación actual. Si el gancho asciende con rapidez, la fase de frenado comienza antes. SI el gancho asciende más despacio, la fase de frenado se inicia más tarde.
─ 2: Fase de frenado. En KranOS se puede ajustar la fuerza o suavidad de la fase de frenado.
─ 3: Punto de conmutación del fin de carrera superior. Cuando se acciona, el gancho se para. Con el inicio individual de la fase de frenado y el ajuste de la fuerza de la fase de frenado, el gancho se acerca ya solo a velocidad lenta poco antes de alcanzar el fin de carrera superior.
─ 4: Punto de conmutación del final de carrera de seguridad. Cuando se acciona, ABUControl desconecta la grúa completa.
─ 5: Inicio de la fase de frenado, calculado individualmente en cada caso, dependiente de la velocidad de elevación actual.
─ 6: Fase de frenado
─ 7: Punto de conmutación del fin de carrera inferior.
EL autodiagnóstico de desgaste del cable:
─ El autodiagnóstico de desgaste del cable de ABUControl sirve para el cálculo del estado de sustitución por desgaste. Calcula el desgaste del cable y asiste al verificador en la comprobación periódica indicando los segmentos del cable sujetos a mayor desgaste.
─ La causa principal del desgaste de un cable en el polipasto son las alternancias de flexión. Es la cantidad de flexiones que sufre un determinado segmento del cable a lo largo del tiempo por las distintas poleas, la trócola, el travesaño de polea de inversión y el tambor de cable.
Junto a la cantidad de alternancias de flexión de un segmento de cable, el peso de la carga suspendida ejerce una influencia importante sobre si en una alternancia de flexión habrá o no rotura de alambres en el segmento de cable flexionado en ese momento.
─ Durante el servicio, ABUControl calcula en qué posición se encuentra actualmente cada segmento del cable. En los segmentos que se encuentran actualmente en una polea o que salen de ella, se considera la carga suspendida como factor y se almacena el desgaste correspondiente para este segmento del cable (sumándolo a los valores ya almacenados para dicho segmento).
─ El cálculo del estado de sustitución por desgaste del cable no sustituye la revisión periódica del cable o la comprobación del cable por el gruísta al comenzar los trabajos. Tampoco se amplían los intervalos de verificación entre comprobaciones periódicas. No se tienen en cuenta los daños de causa externa (como daños mecánicos producidos por el rozamiento del cable con un objeto).