Bottom hoist limiter
Top hoist limiter
ABUControl:
─ ABUControl is a modular crane control based on proven electronic components from automation technology. The various modules on the crane are networked together and thus an intelligent control of crane functions is the result.
─ ABUControl works with a PLC as the central computing unit. It evaluates the control commands from the radio remote control or pendant control as well as all responses from the absolute rotary encoders, motion restrictors (cross-type limit switches, light barriers, etc.) and other modules. Based on this, ABUControl controls the crane drives and hoist drives.
─ The drive axles (crane travel and trolley travel) are equipped with frequency converters. These enable ABUControl to conveniently set the movement profiles. On request, the hoist can also be equipped with frequency converters in order to select and set the hoist profiles for the hoist.
─ The hook position of the hoist and the lifting speed are recorded by an absolute rotary encoder. Through this, ABUControl knows how fast the hoist is turning. This enables some convenient additional functions (e.g. hoist synchronisation control). The highest and lowest hook positions are additionally recorded via an electromechanical gear limit switch.
─ A crane with ABUControl is controlled by an ABURemote radio remote control. With this, some additional functions (e.g. sway control) can be conveniently operated from the transmitter. If the crane is controlled by a different radio remote control, certain functions (e.g. sway control) are unavailable or only available to a limited extent.
─ Only with pendant control (option): The crane can also be controlled by a pendant control. Some functions of ABUControl (e.g. sway control) cannot be used with a pendant control or can only be used to a limited extent.
─ Only with GM modular wire rope hoist (standard equipment) or for cranes or trolleys with LED matrix display (option): Various ABUControl operating information is displayed on the LED matrix display. It also provides information about status reports from various crane components, which enables quick and simple troubleshooting.
─ Only with double lifting speed (option): With this option, the lifting speed can be increased up to 200% (= doubled). This means that the crane can be worked faster. The maximum possible additional lifting speed (from 100%) is dependent on the load attached.
─ Only with super-precision lifting (option, not available for GM modular): With this option, the hoist can be switched to an especially slow lifting speed. This enables extremely exact positioning of the load. Super-precision lifting can be switched on and off at the transmitter or the pendant control.
KranOS:
─ KranOS is a graphic user interface where ABUControl is set.
─ Crane operators and (trained) repair staff can access KranOS on a computer (e.g. laptop, tablet) and change settings and display operating data there.
─ To access KranOS, no special software or app is necessary. The access occurs through a normal Internet browser.
The wiring and programming of ABUControl:
─ ABUControl consists of a central memory-programmable control (PLC) and numerous CAN bus devices (e.g. absolute rotary encoder, frequency converter, etc.) that communicate with each other via a CAN bus network.
─ ABUControl is constructed from modular standard industry components that can be simply and individually replaced when required. This means that if there is a fault, replacement of the entire control is not necessary. Selective individual components can be replaced.
─ All ABUControl modules can be connected with one another by plug-in connections. Thus the modules can be quickly separated from each other.
─ Every crane with ABUControl has a customer-specific configuration. The control thus knows the exact design of the respective crane and the optional version components.
─ The CAN bus devices are programmed after replacement by the central PLC. This occurs either automatically or through the corresponding function in KranOS, depending on the device.
─ After a replacement, the central PLC must be provided with the customer-specific programming via an SD card. In this way, the customer-specific data of the crane is retained.
─ ABUControl is designed from the ground up with EMC compliance. Thus disruptions to other devices and industrial systems by electromagnetic waves are effectively prevented.
─ Control signals at the outputs and inputs of the central PLC, the frequency converters and the field bus couplers can be tested with conventional measuring devices.
─ In addition to the CAN bus network, several components are connected with each other via an Ethernet network. This includes a WLAN module, so that a WLAN network connection can be established from a laptop or tablet computer to the PLC. If further Ethernet network devices are used (e.g. radio data transmission module), all of these Ethernet devices are connected to an Ethernet switch as distributor.
The trolley travel synchronisation control:
─ When there is more than one trolley on the crane, ABUControl regulates the synchronous travel of all trolleys in joint operation. The trolleys therefore have the same travel speed and also the same acceleration time and braking time in joint operation.
─ The transport of a joint load is made even safer with the trolley travel synchronisation control.
─ The trolley travel synchronisation control also functions if the trolleys have different sizes and (each considered separately) different maximum travel speeds.
─ The
trolley travel synchronisation control is possible for up to three trolleys per
crane.
For tandem operation: The trolley travel synchronisation control is
possible for up to two trolleys per crane on both cranes in tandem
operation.
The hoist synchronisation control:
─ When there is more than one hoist on the crane and frequency converters, ABUControl regulates the synchronous lifting and lowering in joint operation. The hoists therefore have the same lifting speed and also the same acceleration time and braking time in joint operation.
─ The transport of a joint load is made even safer with the hoist synchronisation control.
─ The hoist synchronisation control also functions if the hoists have different sizes and (each considered separately) different maximum lifting speeds.
─ The synchronisation control also balances different hoist loads from uneven load distribution. Thus an unevenly distributed load can also be synchronously lifted and lowered by all hoists.
─ The
hoist synchronisation control is possible for up to three hoists per
crane.
For tandem operation: The hoist synchronisation control is possible
for up to two hoists per crane on both cranes in tandem operation.
The movement profiles:
─ For drives with frequency converters: ABUControl allows adjustment of the drive control. Thus, hoist drive and drive can be adjusted to individual usage in the acceleration and braking behaviour as well as in the maximum and minimum speed.
─ The setting parameters are limited so that the crane can only be set within safe limits. Otherwise an acceleration that was too strong could e.g. strain the supporting structure (building) too much.
─ You can switch between a step-less and a two-step movement profile in the KranOS movement profile control.
─ Thus, various cranes within your movement profile can be adjusted to each other to achieve a similar behaviour.
The overload protection:
─ ABUControl records the attached load on all hoists and adopts the overload protection of all individual hoists and the crane total load. Furthermore, it monitors the rotational direction and rotational speed of all hoists and safely switches off if there is an overspeed.
─ ABUControl directly measures the attached load.
─ A load measuring system is used for recording the load. It consists of one or two load sensors or a measurement bolt.
─ The load measuring system serves primarily in detecting an overload on the crane and not in precisely weighing a suspended load. Also for load display in the transmitter or in the LED matrix display it is only used for displaying a rough estimate of the load. The load measuring system cannot be calibrated. The load measuring system has an accuracy of +/- 2 to 5% of the maximum load capacity of the crane.
The building profile control:
─ The building profile comprises all characteristics of a building that could influence the crane travel, trolley travel and lifting/lowering of the crane. This includes the beginning and end of the crane track, obstacles, blocked-off areas, crane flaps and the like.
─ The ABUControl building profile control enables the adaptation and restriction of all crane axes depending on the building profile. For example, the speed can be reduced in front of obstacles or an intermediate stop can be inserted at specific positions. Furthermore, areas can be completely blocked for passing through or partial load ranges can also be set up in a building.
─ If the crane is equipped with a building profile control, the switching points for the braking function or shut-down of the crane and trolley are also integrated in the building profile control.
─ The cross-type limit switches are used for recording the position of crane and trolley.
─ An absolute rotary encoder is used for recording the position of the hoist.
The sway control:
─ The sway control significantly reduces the swinging movement of the load hook during trolley and crane travel.
─ The sway control is based on mathematical calculations. The travel speeds of the crane and trolley, the hook position and the distance from the load hook to the load's centre of gravity (and thus also the length of the lifting tackle) are taken into consideration. The travel motors are then accelerated and braked by ABUControl in such a way that the travel movement counters the swinging movement and thus diminishes it.
─ The sway control can be switched on and off via ABURemote. The value set for the distance from the load hook to the load's centre of gravity can be changed via ABURemote.
─ The sway control can only reduce the swaying by acceleration and braking through mathematical calculations. Other influences such as wind, hitting an obstacle or similar, cannot be offset.
─ The acceleration and braking distances of cranes and trolleys do not alter considerably through the sway control.
─ The sway control initially functions only with a single hoist
or on a crane with several trolleys in individual control, providing the unused
trolley is in parking position.
During the joint operation of several
trolleys or in tandem operation, the sway control must be separately enabled.
In addition, the ABURemote radio remote control must
be specially configured for this as well as the cranes and trolleys which are of
the same type. The sway control functions in joint operation of multiple
trolleys or in tandem operation only if the centres of gravity of the loads are
the same on both hoists, meaning the hook position and the length of the lifting
tackle give the same overall length when added together.
The anti-collision device:
─ The anti-collision device on the crane and trolleys prevents two cranes (two trolleys) being able to hit each other at high speed or at low speed.
─ The anti-collision device functions via a reflective light barrier or a distance sensor with laser beam depending on the application.
─ The reflective light barriers and the distance sensors can react in a sensitive manner to the influences of dust, snow or particulates in the air. If the light beam is disrupted, the crane or trolley brakes and stops.
The tandem control:
─ Two overhead travelling cranes with a joint load can be controlled simultaneously with just one transmitter by the tandem control.
─ The tandem control works in combination with the synchronisation control. ABUControl controls the synchronous trolley travel and crane travel in tandem operation as well as the synchronous lifting (optional). Thus, the cranes have the same speed in the crane axes with narrow tolerances as well as the same acceleration time and braking time.
─ The tandem control makes the transport of a joint load even safer.
─ The tandem control also functions if the cranes have different maximum load capacities and (each considered separately) different maximum speeds.
─ Loads that exceed the maximum load capacity of an individual crane in the crane installation can be lifted with the tandem control. As the load affects both cranes, the maximum load capacity of both cranes can be added together, both for cranes with identical maximum load capability and for those with different maximum load capacities. For unbalanced load distribution the total maximum load capacity is correspondingly lower.
─ In doing this, the corresponding parameters (e.g. "Acceleration time", "Braking time" and "Speed Maximum") are compared between the two cranes and, as far as possible, adapted so that the cranes are compatible. The travel profiles must be set identically for both cranes (e.g. "Step-less").
─ Thus, for example, all travel limit switches on the crane and trolley, hoist limit switches and the overload protection are jointly evaluated. If the crane stops in one of the crane axes, the other crane also always stops in the same crane axis. The other crane axes can be moved farther without an intermediate stop.
The electronic track guidance system (option):
─ The electronic track guidance system can reduce unbalanced loads as well as wear on the wheel flanges of the wheels. These occur when, for example, the trolley with load is in the load hook on the left or right end of the main girder and the crane travels.
─ In addition, the distance of both wheels of an end carriage from the crane track is measured. If the crane runs unevenly (e.g. due to an unbalanced load), ABUControl evens this out again automatically, via a differential control of the drives of both end carriages.
─ This means that the wear on the wheel flanges and the crane track can be significantly reduced.
|
Bottom hoist limiter |
|
|
| |
|
|
Top hoist limiter |
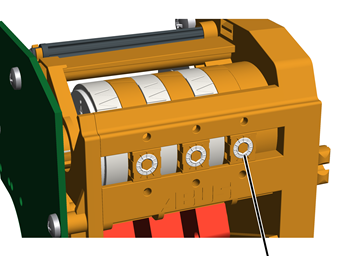
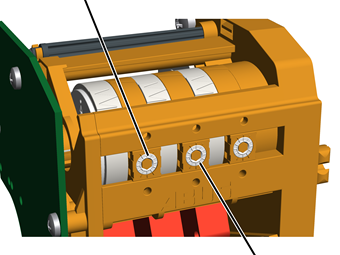
─ The wire rope hoist has a gear limit switch that functions as a mechanical hoist limit switch. It is directly coupled with the cable drum. It ensures that the load hook does not travel farther than the highest hook position or the lowest hook position.
─ The upper switching point is called the “top hoist limiter” (middle adjusting screw); the lower switching point is called the “bottom hoist limiter” (left adjusting screw).
─ Shortly before the load hook reaches the switching point of a hoist limiter, ABUControl slowly brakes the hoist motor. This method means that the switching points of the hoist limiter are only activated with a slow lifting speed.
|
|
| |
|
| ||
|
|
Backup limiter | |
─ To additionally increase safety, the gear limit switch has another switching point. It is called the “Backup limiter” (right adjusting screw). It is located above the top hoist limiter and serves as an additional switching point when lifting.
─ If the top hoist limiter should fail and the load hook then travels over the switching point of the top hoist limiter, ABUControl switches the entire crane off. The backup limiter has been set at the factory and is tamper-proof.
The gear limit switch without normal operative travel to the top hoist limiter:
─ The top hoist limiter must not be travelled to during normal operation. If it is travelled to, the load hook stops at the switching point of the top hoist limiter. The backup limiter switching point is above the top hoist limiter switching point and can therefore not be activated in a normal case.
─ If the hoist limit switch is incorrectly set or during a technical fault, it can happen that the backup limiter is nevertheless activated. Then the backup limiter must be bridged so that the crane can be switched on again. See "Activating backup limiter" on page 78.
The gear limit switch with normal operative travel to the top hoist limiter:
─ If the highest hook position must be travelled to in normal operation, the top hoist limiter is frequently activated and can fail because of this. In this case, the backup limiter ensures that the crane comes to a safe stop. So that the backup limiter can be regularly tested, the wire rope hoist has a toggle switch with which the top hoist limiter can be manually bridged and the crane can be manually switched on again after the test.
|
|
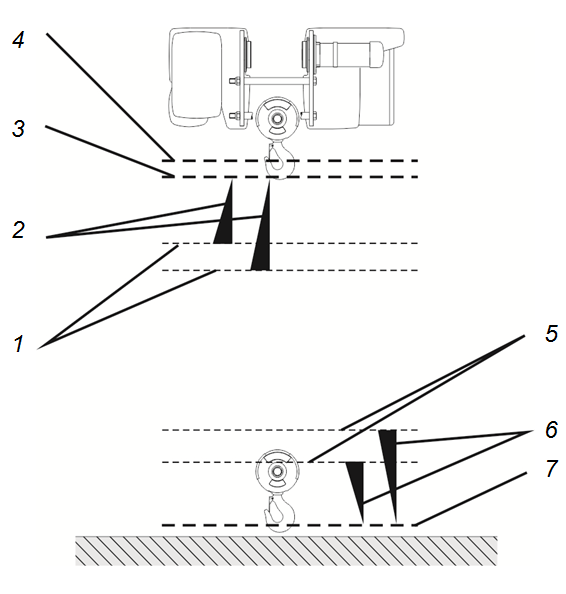
─ 1: ABUControl begins the hoist drive brake phase shortly before the highest hook position. ABUControl individually calculates at which point the brake phase begins each time, depending on the current lifting speed. If the load hook travels upwards quickly, the brake phase begins earlier. If the load hook travels upwards slowly, the brake phase begins later.
─ 2: Brake phase. How strong or gentle the brake phase is can be set in KranOS.
─ 3: Switching point of the top hoist limiter. If it is activated, the load hooks stands still. Due to the individual beginning of the brake phase and the adjustable strength of the brake phase, the load hook only lifts with slow lifting speed shortly before reaching the top hoist limiter.
─ 4: Switching point of the backup limiter. If it is activated, ABUControl switches the entire crane off.
─ 5: Start of the brake phase, individually calculated each time, depending on the current lifting speed.
─ 6: Brake phase.
─ 7: Switching point of the bottom hoist limiter.
Discard prognosis
─ The discard prognosis of ABUControl is used in calculating the maximum acceptable wear of the wire rope. It determines the wear of the wire rope and supports the examiner in the regular inspection by displaying the wire rope sections with the greatest wear.
─ The main cause of wire rope wear on the wire rope hoist are the cyclic bendings. This is the number of bends that a particular wire rope section makes over the course of time over the individual reels on the bottom block and the deflection roller crosshead as well as on the cable drum.
Not only the number of cyclic bendings of a wire rope section but also the weight of the currently suspended load considerably influences whether or not broken wires will occur in the bent wire rope section during a cyclic bending.
─ During running operation, ABUControl calculates the position at which the wire rope section is currently located. For wire rope sections running directly onto or off a reel, the suspended load is factored in and the corresponding wear for this rope section is saved (and used along with the other already saved values).
─ The calculation of the maximum acceptable wear of the wire rope is no substitute for the regular inspection of the wire rope or for the inspection by the crane operator at the start of work. The intervals between the regular inspections are likewise not extended. Exterior damage (e.g. mechanical damage due to the wire rope sliding against an object) is also not taken into account.