ABUControl consists of:
─ Crane control
─ Trolley control
─ Absolute rotary encoder on the hoist
─ Load measuring system on the hoist
─ Distance sensor on the trolley or trolleys (optional)
─ Distance sensor on the crane (optional)
─ Additional motion restrictor (cross-type limit switch and/or reflective light barriers) (optional)
─ LED matrix display (optional)
─ Additional cross-type limit switches for building profile control (optional)
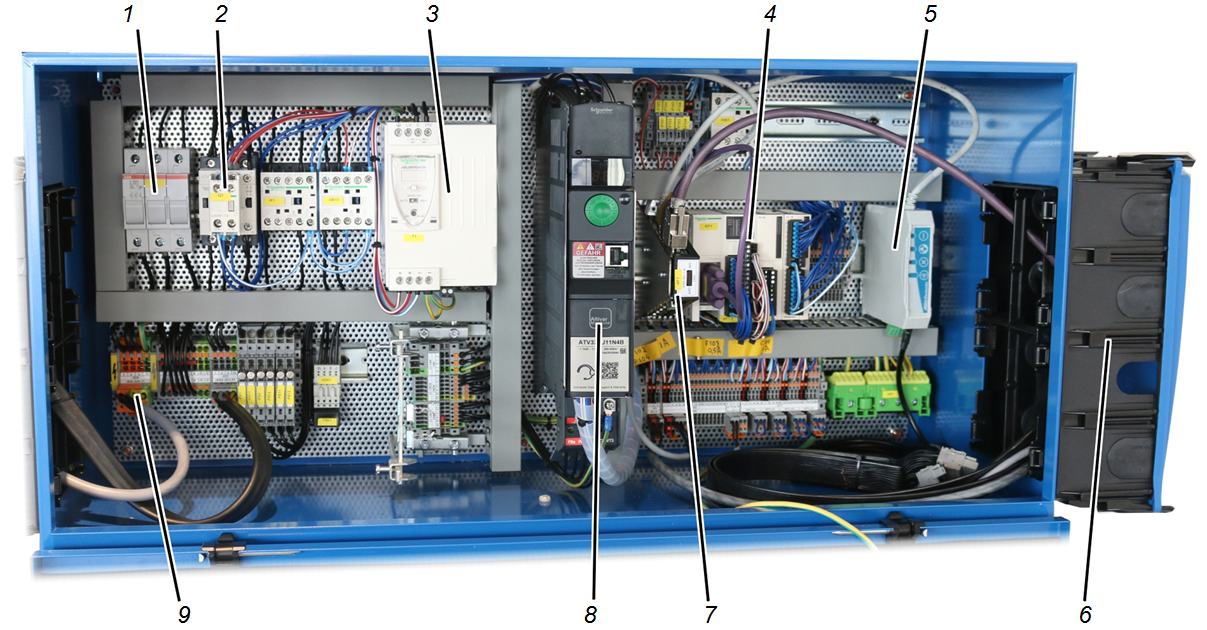
Overall view of the crane control:
The crane control set up varies according to the crane. The following figure can be used as a guide.
|
|
─ 1: Fuse isolating link
─ 2: Main contactor
─ 3: Power pack
─ 4: Field bus coupler for input and output signals
─ 5: ABURemote receiver
─ 6: Cable entry housing
─ 7: CAN distributor
─ 8: Frequency converter
─ 9: Feed unit
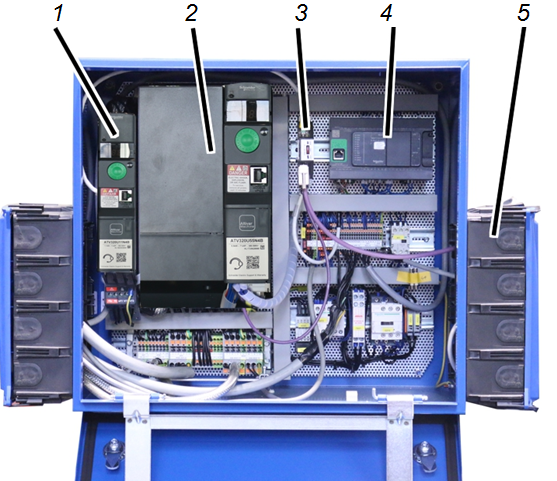
Overall view of trolley control:
The trolley control set up varies according to the crane. The following figure can be used as a guide.
|
|
─ 1: Trolley drive frequency converter
─ 2: Hoist frequency converter
─ 3: CAN distributor
─ 4: PLC
─ 5: Cable entry housing
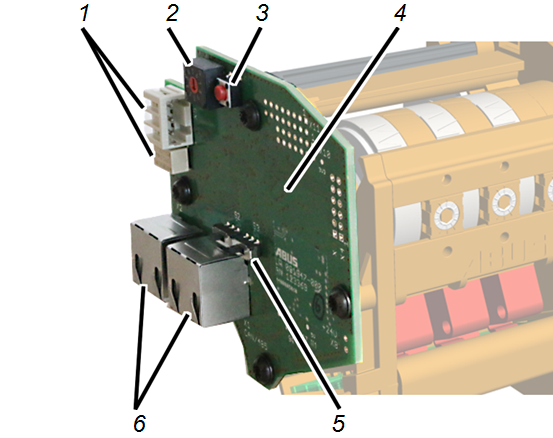
Absolute rotary encoder "AWG" (on gear limit switch "GGS"):
|
|
─ 1: Relay and pin multipoint connector for additional switching tasks (option)
─ 2: Setting wheel for device address (option)
─ 3: Button for resetting the device address
─ 4: Circuit board
─ 5: Switch for terminating resistor
─ 6: Connection for CAN bus network and Modbus network
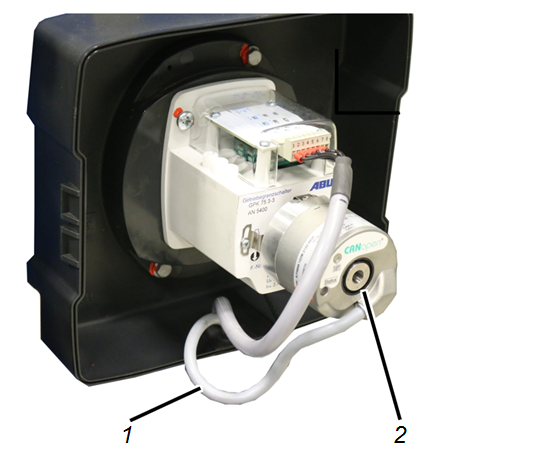
"Kübler" absolute rotary encoder (on gear limit switch "GPK"):
|
|
─ 1: CAN bus line
─ 2: "Kübler" absolute rotary encoder