Hubbegrenzer unten
Hubbegrenzer oben
ABUControl:
─ ABUControl ist eine modulare Kransteuerung auf Basis von bewährten Elektronik-Komponenten aus der Automatisierungstechnik. Die verschiedenen Module am Kran sind miteinander vernetzt und ergeben so eine intelligente Steuerung der Kranfunktionen.
─ ABUControl arbeitet mit einer SPS als zentrale Recheneinheit. Sie wertet die Steuerbefehle von Funksteuerung oder Hängetaster aus sowie alle Rückmeldungen von Absolutwert-Drehgebern, Bewegungsbegrenzern (Kreuzhebelschalter, Lichtschranken,…) und anderen Modulen. Darauf basierend steuert ABUControl die Fahrantriebe und Hubantriebe des Krans.
─ Die Fahrachsen (Kranfahren und Katzfahren) sind mit Frequenzumrichtern ausgerüstet. Dadurch ermöglicht ABUControl ein komfortables Einstellen der Bewegungsprofile. Auf Wunsch kann auch das Hubwerk mit Frequenzumrichtern ausgerüstet werden, um auch beim Hubwerk die Hubprofile auswählen und einstellen zu können.
─ Die Hakenstellung des Hubwerks und die Hubgeschwindigkeit werden über einen Absolutwert-Drehgeber erfasst. Dadurch weiß ABUControl, wie schnell sich das Hubwerk dreht. Dies ermöglicht einige komfortable Zusatzfunktionen (z.B. Gleichlaufregelung Hubwerk). Die höchste und tiefste Hakenstellung werden zusätzlich über einen elektromechanischen Getriebegrenzschalter erfasst.
─ Ein Kran mit ABUControl wird mit einer Funksteuerung ABURemote gesteuert. Damit können einige Zusatzfunktionen (z.B. Pendeldämpfung) komfortabel vom Sender aus bedient werden. Wird der Kran mit einer anderen Funksteuerung gesteuert, stehen einige Funktionen (z.B. Pendeldämpfung) nicht oder nur eingeschränkt zur Verfügung.
─ Nur bei Hängetaster (Option): Der Kran kann auch mit einem Hängetaster gesteuert werden. Einige Funktionen von ABUControl (z.B. Pendeldämpfung) können mit einem Hängetaster nicht oder nur eingeschränkt genutzt werden.
─ Nur bei Seilzug GM modular (Serienausstattung) oder bei Kran oder Katze mit LED-Matrixanzeige (Option): Auf der LED-Matrixanzeige werden verschiedene Betriebsinformationen der ABUControl angezeigt. Auch informiert sie über Statusmeldungen der verschiedenen Krankomponenten, wodurch eine schnelle und einfache Fehlerbehebung ermöglicht wird.
─ Nur bei doppelter Hubgeschwindigkeit (Option): Mit dieser Option kann die Hubgeschwindigkeit auf bis zu 200% erhöht (= verdoppelt) werden. Dadurch kann mit dem Kran schneller gearbeitet werden. Die maximal mögliche zusätzliche Hubgeschwindigkeit (ab 100 %) ist abhängig von der angehängten Last.
─ Nur bei Super-Feinhub (Option, nicht verfügbar bei GM modular): Mit dieser Option kann das Hubwerk auf eine besonders langsame Hubgeschwindigkeit geschaltet werden. Dadurch ist ein äußerst genaues Positionieren der Last möglich. Super-Feinhub kann am Sender oder am Hängetaster ein- und ausgeschaltet werden.
KranOS:
─ KranOS ist eine grafische Benutzeroberfläche, mit der ABUControl eingestellt wird.
─ Kranführer und (geschulte) Instandhalter können mit einem Computer (z.B. Laptop, Tablet) auf KranOS zugreifen und dort Einstellungen ändern und Betriebsdaten anzeigen lassen.
─ Für den Zugriff auf KranOS ist keine spezielle Software oder App nötig. Der Zugriff erfolgt über einen normalen Internet-Browser.
Die Verdrahtung und Programmierung von ABUControl:
─ ABUControl besteht aus einer zentralen Speicherprogrammierbaren Steuerung (SPS) und zahlreichen CAN-Bus-Geräten (z.B. Absolutwert-Drehgeber, Frequenzumrichter,…), die über ein CAN-Bus-Netzwerk miteinander kommunizieren.
─ ABUControl ist aus modularen Standard-Industrie-Komponenten aufgebaut, die bei Bedarf einfach und einzeln getauscht werden können. Dadurch ist bei einem Defekt kein Austausch der gesamten Steuerung nötig. Es können gezielt einzelne Komponenten getauscht werden.
─ Alle Module der ABUControl sind durch Steckverbindungen miteinander verbunden. Dadurch können die Module schnell voneinander getrennt werden.
─ Jeder Kran mit ABUControl ist kundenspezifisch parametriert. Dadurch kennt die Steuerung die genaue Auslegung des jeweiligen Krans und die optionalen Ausstattungskomponenten.
─ Die CAN-Bus-Geräte werden nach einem Austausch durch die zentrale SPS programmiert. Dies geschieht je nach Gerät automatisch oder durch eine entsprechende Funktion in KranOS.
─ Die zentrale SPS muss nach einem Austausch über eine SD-Karte mit der kundenspezifischen Programmierung versehen werden. Auf diese Weise bleiben die kundenspezifischen Daten des Krans erhalten.
─ ABUControl ist von Grund auf EMV-gerecht konzipiert. Dadurch werden Störungen durch elektromagnetische Wellen an anderen Geräten und Industrieanlagen wirkungsvoll verhindert.
─ An den Ausgängen und Eingängen der zentralen SPS, der Frequenzumrichter und der Feldbuskoppler können mit herkömmlichen Messgeräten Steuersignale geprüft werden.
─ Zusätzlich zum CAN-Bus-Netzwerk sind einige Komponenten durch ein Ethernet-Netzwerk miteinander verbunden. Dies ist unter anderem ein WLAN-Modul, das ein WLAN-Netzwerk aufbaut, um eine Verbindung von einem Laptop oder Tablet-Computer mit der SPS herzustellen. Werden noch weitere Ethernet-Netzwerk-Geräte verwendet (z.B. Datenfunkmodul), werden alle Ethernet-Netzwerk-Geräte an einen Ethernet-Switch als Verteiler angeschlossen.
Die Gleichlaufregelung Katzfahren:
─ Bei mehr als einer Katze am Kran regelt ABUControl die synchrone Fahrt aller Katzen im gemeinsamen Betrieb. Dadurch haben die Katzen bei gemeinsamem Betrieb dieselbe Fahrgeschwindigkeit sowie Beschleunigungszeit und Bremszeit.
─ Durch die Gleichlaufregelung Katzfahren wird der Transport einer gemeinsamen Last noch sicherer.
─ Die Gleichlaufregelung Katzfahren funktioniert auch, wenn die Katzen verschiedene Baugrößen und (jeweils separat betrachtet) unterschiedliche maximale Fahrgeschwindigkeiten haben.
─ Die
Gleichlaufregelung Katzfahren ist für bis zu drei Katzen pro Kran
möglich.
Bei Tandem-Betrieb: Die Gleichlaufregelung Katzfahren ist an beiden
Kranen im Tandem-Betrieb für bis zu jeweils zwei Katzen pro Kran möglich.
Die Gleichlaufregelung Hubwerk:
─ Bei mehr als einem Hubwerk am Kran und Frequenzumrichtern regelt ABUControl das synchrone Heben und Senken im gemeinsamen Betrieb. Dadurch haben die Hubwerke bei gemeinsamem Betrieb dieselbe Hubgeschwindigkeit sowie Beschleunigungszeit und Bremszeit.
─ Durch die Gleichlaufregelung Hubwerk wird der Transport einer gemeinsamen Last noch sicherer.
─ Die Gleichlaufregelung Hubwerk funktioniert auch, wenn die Hubwerke verschiedene Baugrößen und (jeweils separat betrachtet) unterschiedliche maximale Hubgeschwindigkeiten haben.
─ Die Gleichlaufregelung gleicht auch unterschiedliche Belastungen der Hubwerke durch eine ungleiche Lastverteilung aus. Dadurch wird auch eine ungleichmäßig verteilte Last von allen Hubwerken synchron gehoben und gesenkt.
─ Die
Gleichlaufregelung Hubwerk ist für bis zu drei Hubwerke pro Kran möglich.
Bei
Tandem-Betrieb: Die Gleichlaufregelung Hubwerk ist an beiden Kranen im
Tandem-Betrieb für bis zu jeweils zwei Hubwerken pro Kran möglich.
Die Bewegungsprofile:
─ Bei Antrieben mit Frequenzumrichtern: ABUControl erlaubt eine Anpassung der Steuerung der Antriebe. Dadurch können Hubantrieb und Fahrantriebe im Beschleunigungs- und Bremsverhalten sowie in der Maximal- und Minimalgeschwindigkeit an die eigenen Gewohnheiten angepasst werden.
─ Die Parameter zur Einstellung sind dabei so begrenzt, dass der Kran nur in sicheren Grenzen eingestellt werden kann. Durch eine zu starke Beschleunigung könnte sonst z.B. die Tragkonstruktion (Gebäude) zu stark belastet werden.
─ In der Bewegungsprofilsteuerung in KranOS kann zwischen einem stufenlosen und einem zweistufigen Bewegungsprofil umgeschaltet werden.
─ Dadurch können unterschiedliche Krane in ihrem Bewegungsprofil aneinander angeglichen werden, um ein ähnliches Verhalten zu erreichen.
Die Überlast-Sicherung:
─ ABUControl erfasst die angehängte Last an allen Hubwerken und übernimmt die Überlast-Sicherung aller Hubwerke einzeln und der Summenlast des Krans. Weiterhin überwacht sie die Drehrichtung und Drehzahl aller Hubwerke und schaltet im Falle einer Überdrehzahl sicher ab.
─ ABUControl misst die angehängte Last direkt.
─ Zur Erfassung der Last wird ein Lastmesssystem eingesetzt. Es besteht aus einem oder zwei Lastsensoren oder einem Messbolzen.
─ Das Lastmesssystems dient vorrangig zum Feststellen einer Überlast am Kran und nicht zum genauen Wiegen einer angehängten Last. Auch bei einer Lastanzeige im Sender oder per LED-Matrixanzeige dient die Lastanzeige nur zur groben Einschätzung der Last. Das Lastmesssystem kann nicht geeicht werden. Das Lastmesssystem hat eine Genauigkeit von +/- 2 bis 5% der maximalen Tragfähigkeit des Krans.
Die Hallenprofilsteuerung:
─ Das Hallenprofil umfasst alle Merkmale einer Halle, die das Kranfahren, Katzfahren und Heben/Senken des Krans beeinflussen können. Dazu gehören Anfang und Ende der Kranbahn, Hindernisse, gesperrte Bereiche, Kranklappen und ähnliches.
─ Die Hallenprofilsteuerung von ABUControl ermöglicht die Anpassung und Einschränkung aller Kranachsen abhängig vom Hallenprofil. Dabei kann z.B. vor Hindernissen die Geschwindigkeit reduziert oder an bestimmten Positionen ein Zwischenstopp eingelegt werden. Darüber hinaus können Bereiche für die Durchquerung komplett gesperrt oder auch in einer Halle Teillastbereiche eingerichtet werden.
─ Ist der Kran mit einer Hallenprofilsteuerung ausgestattet, werden auch die Schaltpunkte für die Vor- und Endabschaltung von Kran und Katze in das Hallenprofil integriert.
─ Zur Erfassung der Position von Kran und Katze werden Kreuzhebelschalter verwendet.
─ Zur Erfassung der Position des Hubwerks wird ein Absolutwert-Drehgeber eingesetzt.
Die Pendeldämpfung:
─ Die Pendeldämpfung reduziert deutlich die Pendelbewegung des Lasthakens bei der Katzfahrt und Kranfahrt.
─ Die Pendeldämpfung basiert auf mathematischen Berechnungen. Dabei werden die Fahrgeschwindigkeiten von Kran und Katze, die Hakenstellung und der Abstand vom Lasthaken bis zum Schwerpunkt der Last (somit auch die Länge des Anschlagmittels) berücksichtigt. Die Fahrmotoren werden dann von ABUControl so beschleunigt und gebremst, dass die Fahrbewegung der Pendelbewegung entgegenwirkt und die Pendelbewegung dadurch gedämpft wird.
─ Die Pendeldämpfung kann über ABURemote ein- und ausgeschaltet werden. Der eingestellte Wert für den Abstand vom Lasthaken bis zum Schwerpunkt der Last kann über ABURemote verändert werden.
─ Die Pendeldämpfung kann lediglich durch mathematische Berechnungen das Pendeln durch Beschleunigung und Bremsen reduzieren. Äußere Einflüsse wie Wind, das Anstoßen gegen ein Hindernis oder Ähnliches können nicht ausgeglichen werden.
─ Die Beschleunigungs- und Bremswege von Kran und Katze verändern sich durch die Pendeldämpfung nicht wesentlich.
─ Die Pendeldämpfung funktioniert zunächst nur bei einem
einzelnen Hubwerk oder bei einem Kran mit mehreren Katzen in Einzelsteuerung,
wenn die nicht genutzte Katze in Parkposition steht.
Bei gemeinsamem Betrieb
von mehreren Katzen oder im Tandem-Betrieb muss die Pendeldämpfung gesondert
freigegeben werden. Zusätzlich muss die Funksteuerung
ABURemote speziell hierfür konfiguriert werden sowie die Krane und Katzen die
selbe Bauart haben. Die Pendeldämpfung funktioniert im gemeinsamem Betrieb
von mehreren Katzen oder im Tandem-Betrieb nur, wenn die Schwerpunkte der Last
an beiden Hubwerken gleich sind, also die Hakenstellung und die Länge des
Anschlagmittels zusammengerechnet die selbe Gesamtlänge ergeben.
Die Zusammenfahrsicherung:
─ Die Zusammenfahrsicherung an Kran und Katzen verhindert, dass zwei Krane (zwei Katzen) mit schneller Fahrgeschwindigkeit oder mit langsamer Fahrgeschwindigkeit gegeneinanderprallen können.
─ Die Zusammenfahrsicherung funktioniert je nach Anwendungsfall über eine Reflexionslichtschranke oder über einen Distanzsensor mit Laserstrahl.
─ Die Reflexionslichtschranken und die Distanzsensoren können empfindlich auf Einflüsse wie Staub, Schnee oder Partikel in der Luft reagieren. Wird der Lichtstrahl oder Laserstrahl unterbrochen, bremst der Kran oder die Katze ab und bleibt stehen.
Die Tandemregelung:
─ Mit der Tandemregelung können zwei Laufkrane mit einer gemeinsamen Last gleichzeitig mit nur einem Sender gesteuert werden.
─ Die Tandemregelung arbeitet in Kombination mit der Gleichlaufregelung. ABUControl regelt dabei das synchrone Katzfahren und Kranfahren im Tandem-Betrieb sowie das synchrone Heben (optional). Dadurch haben die Krane in den Kranachsen in engen Toleranzen dieselbe Geschwindigkeit sowie Beschleunigungszeit und Bremszeit.
─ Durch die Tandemregelung wird der Transport einer gemeinsamen Last noch sicherer.
─ Die Tandemregelung funktioniert auch, wenn die Krane unterschiedliche maximale Tragfähigkeiten und (jeweils separat betrachtet) unterschiedliche maximale Geschwindigkeiten haben.
─ Mit der Tandemregelung können Lasten gehoben werden, die die maximale Tragfähigkeit eines einzelnen Krans der Krananlage überschreiten. Da die Last beide Krane belastet, kann die maximale Tragfähigkeit der beiden Krane zusammengezählt werden, sowohl bei Kranen mit identischer maximaler Tragfähigkeit als auch bei unterschiedlicher maximaler Tragfähigkeit. Bei ungleichmäßiger Lastverteilung ist die gesamte maximale Tragfähigkeit entsprechend geringer.
─ Dabei werden die entsprechenden Parameter (z.B. „Beschleunigungszeit“, „Bremszeit“ und „Geschwindigkeit Maximum“) zwischen den beiden Kranen verglichen und, soweit möglich, so angeglichen, dass beide Krane kompatibel sind. Die Fahrprofile müssen bei beiden Kranen identisch eingestellt sein (z.B. „stufenlos“).
─ Dadurch werden unter anderem alle Fahrgrenzschalter an Kran und Katze, Hubgrenzschalter und die Überlast-Sicherung gemeinsam ausgewertet. Bleibt der Kran in einer der Kranachsen stehen, stoppt auch der jeweils andere Kran in der gleichen Kranachse. Die anderen Kranachsen können ohne Zwischenstopp weiter verfahren werden.
Die elektronische Spurführung (Option):
─ Die elektronische Spurführung kann einseitige Belastungen sowie Verschleiß der Spurkränze der Laufräder reduzieren. Diese treten z.B. auf, wenn die Katze mit Last im Haken am linken oder rechten Ende des Hauptträgers steht und der Kran fährt.
─ Dazu wird der Abstand beider Laufräder eines Fahrwerksträgers zur Kranschiene gemessen. Läuft der Kran (z.B. durch einseitige Belastung) schief, gleicht ABUControl dies automatisch durch eine unterschiedliche Regelung der Fahrantriebe beider Fahrwerksträger wieder aus.
─ Dadurch kann der Verschleiß der Spurkränze und der Kranbahn deutlich reduziert werden.
|
Hubbegrenzer unten |
|
|
| |
|
|
Hubbegrenzer oben |
─ Der Seilzug hat einen Getriebegrenzschalter, der als mechanischer Hubgrenzschalter arbeitet. Er ist direkt mit der Seiltrommel gekoppelt. Er sorgt dafür, dass der Lasthaken nicht über die höchste Hakenstellung oder die tiefste Hakenstellung hinaus fährt.
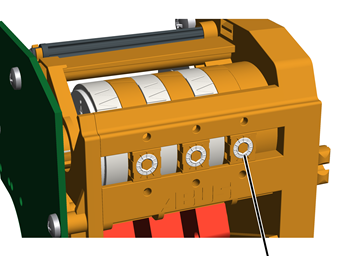
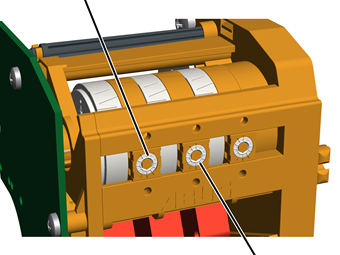
─ Der obere Schaltpunkt heißt ‚Hubbegrenzer oben’ (mittlere Einstellschraube), der untere Schaltpunkt heißt ‚Hubbegrenzer unten’ (linke Einstellschraube).
─ Kurz bevor der Lasthaken den Schaltpunkt eines Hubbegrenzers erreicht, bremst ABUControl den Hubmotor langsam ab. Die Schaltpunkte des Hubbegrenzers werden auf diese Weise nur mit langsamer Hubgeschwindigkeit betätigt.
|
|
| |
|
| ||
|
|
Backup-Begrenzer | |
─ Um die Sicherheit zusätzlich zu erhöhen, hat der Getriebegrenzschalter einen weiteren Schaltpunkt. Er heißt ‚Backup- Begrenzer‘ (rechte Einstellschraube). Er liegt oberhalb des Hubbegrenzers oben und dient als zusätzlicher Schaltpunkt beim Heben.
─ Wenn der Hubbegrenzer oben versagen sollte und der Lasthaken daher den Schaltpunkt des Hubbegrenzers oben überfährt, schaltet ABUControl den gesamten Kran aus. Der Backup-Begrenzer ist werksseitig eingestellt und verplombt.
Der Getriebegrenzschalter ohne betriebsmäßiges Anfahren des Hubbegrenzers oben:
─ Der Hubbegrenzer oben darf nicht betriebsmäßig angefahren werden. Wird er angefahren, bleibt der Lasthaken am Schaltpunkt des Hubbegrenzers oben stehen. Der Schaltpunkt des Backup-Begrenzers liegt oberhalb des Schaltpunktes des Hubbegrenzers oben und kann daher im Normalfall nicht betätigt werden.
─ Ist der Hubgrenzschalter falsch eingestellt oder bei einem technischen Defekt kann es passieren, dass der Backup-Begrenzer trotzdem betätigt wird. Dann muss der Backup-Begrenzer überbrückt werden, um den Kran wieder einzuschalten. Siehe „Backup-Begrenzer freischalten“ Seite 78.
Der Getriebegrenzschalter mit betriebsmäßigem Anfahren des Hubbegrenzers oben:
─ Muss die höchste Hakenstellung betriebsmäßig angefahren werden, wird der Hubbegrenzer oben häufiger betätigt und kann dadurch versagen. In diesem Fall sorgt der Backup-Begrenzer dafür, dass der Kran sicher zum Stillstand kommt. Damit der Backup-Begrenzer regelmäßig geprüft werden kann, hat der Seilzug einen Knebeltaster, mit dem der Hubbegrenzer oben manuell überbrückt und der Kran nach dem Prüfen des Backup-Begrenzers manuell wieder eingeschaltet werden kann.
|
|
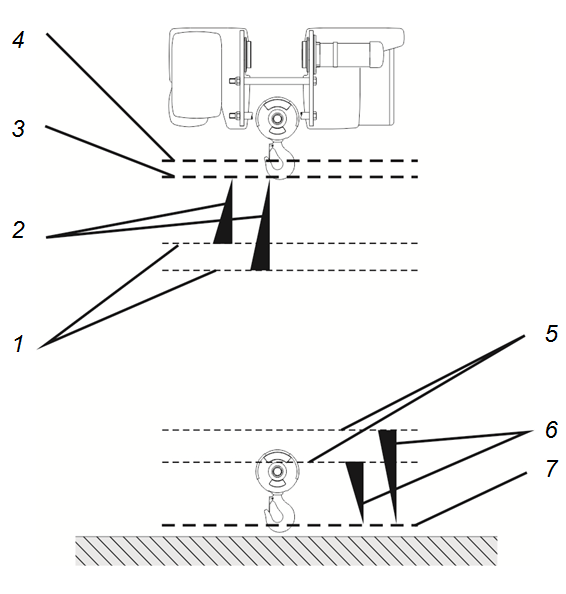
─ 1: Kurz vor der höchsten Hakenstellung beginnt ABUControl mit der Bremsphase des Hubantriebs. An welchem Punkt die Bremsphase beginnt, berechnet ABUControl jedes Mal individuell, abhängig von der aktuellen Hubgeschwindigkeit. Fährt der Lasthaken schnell nach oben, beginnt die Bremsphase früher. Fährt der Lasthaken langsamer nach oben, beginnt die Bremsphase später.
─ 2: Bremsphase. Wie stark oder sanft die Bremsphase ist, kann in KranOS eingestellt werden.
─ 3: Schaltpunkt des Hubbegrenzers oben. Wird er betätigt, bleibt der Lasthaken stehen. Durch den individuellen Beginn der Bremsphase und die einstellbare Stärke der Bremsphase hebt der Lasthaken kurz vor Erreichen des Hubbegrenzers oben nur noch mit langsamer Hubgeschwindigkeit.
─ 4: Schaltpunkt des Backup-Begrenzers. Wird er betätigt, schaltet ABUControl den gesamten Kran aus.
─ 5: Beginn der Bremsphase, jedes Mal individuell berechnet, abhängig von der aktuellen Hubgeschwindigkeit.
─ 6: Bremsphase.
─ 7: Schaltpunkt des Hubbegrenzers unten.
Die Ablegeprognose:
─ Die Ablegeprognose von ABUControl dient zur Berechnung der Ablegereife des Seils. Sie berechnet den Verschleiß des Seils und unterstützt den Prüfer bei der wiederkehrenden Prüfung, indem es die Seilabschnitte mit dem höchsten Verschleiß anzeigt.
─ Die Hauptursache für den Verschleiß des Seils am Seilzug sind die Biegewechsel. Das ist die Anzahl der Biegungen, die ein bestimmter Seilabschnitt im Laufe der Zeit über die einzelnen Seilrollen an der Unterflasche und der Umlenkrollentraverse sowie an der Seiltrommel macht.
Neben der Anzahl der Biegewechsel eines Seilabschnitts hat das Gewicht der aktuell angehängten Last einen wesentlichen Einfluss darauf, ob es bei einem Biegewechsel zu Drahtbrüchen im gerade gebogenen Seilabschnitt kommt oder nicht.
─ Im laufenden Betrieb errechnet ABUControl, an welcher Position sich welcher Seilabschnitt aktuell befindet. Bei den Seilabschnitten, die gerade auf eine oder von einer Seilrolle laufen, wird die angehängte Last als Faktor berücksichtigt und der entsprechende Verschleiß für diesen Seilabschnitt gespeichert (und zu den schon gespeicherten Werten hinzugerechnet).
─ Die Berechnung der Ablegereife des Seils ist kein Ersatz für die wiederkehrende Prüfung oder für die Prüfung des Seils durch den Kranführer bei Arbeitsbeginn. Ebenso werden die Prüfabstände zwischen den wiederkehrenden Prüfungen nicht verlängert. Beschädigungen von außen (z.B. mechanische Schäden durch Entlangschleifen des Seils an einem Gegenstand) werden nicht berücksichtigt.