ABUControl besteht aus:
─ Kransteuerung
─ Katzsteuerung
─ Absolutwert-Drehgeber am Hubwerk
─ Lastmesssystem am Hubwerk
─ Distanzsensor an der Katze oder den Katzen (optional)
─ Distanzsensor am Kran (optional)
─ Weitere Bewegungsbegrenzer (Kreuzhebelschalter und/oder Reflexionslichtschranken) (optional)
─ LED-Matrixanzeige (optional)
─ Weitere Kreuzhebelschalter für Hallenprofilsteuerung (optional)
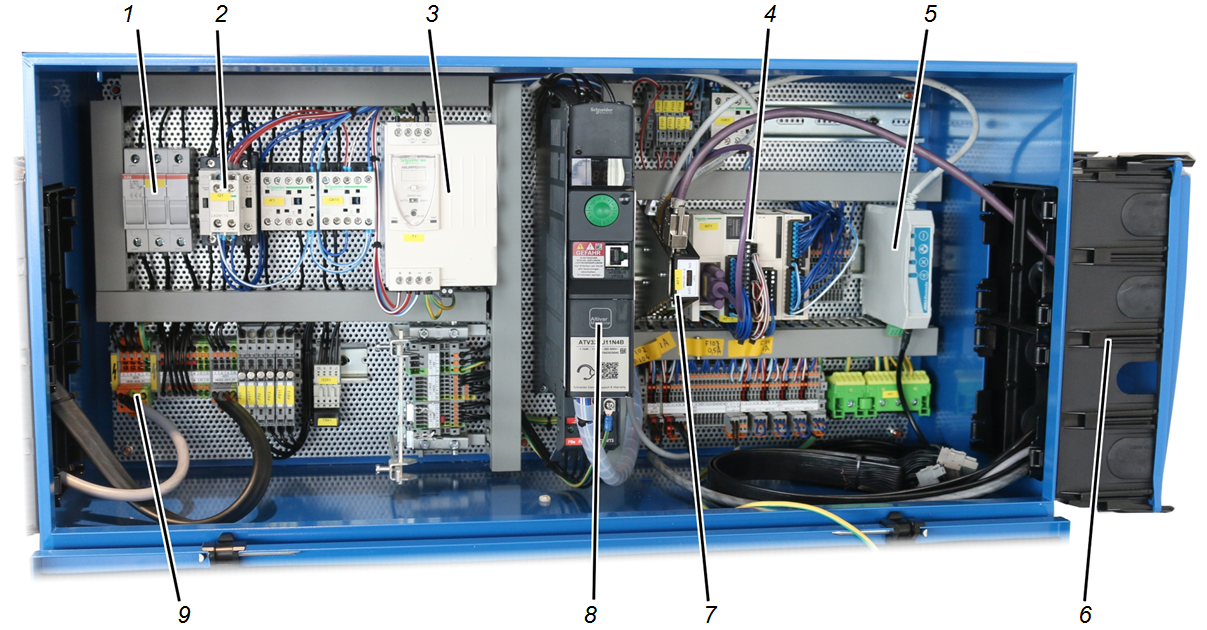
Gesamtansicht Kransteuerung:
Je nach Kran ist die Kransteuerung unterschiedlich aufgebaut. Zur Orientierung kann das folgende Bild genutzt werden.
|
|
─ 1: Sicherungstrenner
─ 2: Hauptschütz
─ 3: Netzteil
─ 4: Feldbuskoppler für Ein- und Ausgangssignale
─ 5: Empfänger ABURemote
─ 6: Flanschgehäuse
─ 7: CAN-Verteiler
─ 8: Frequenzumrichter
─ 9: Einspeisung
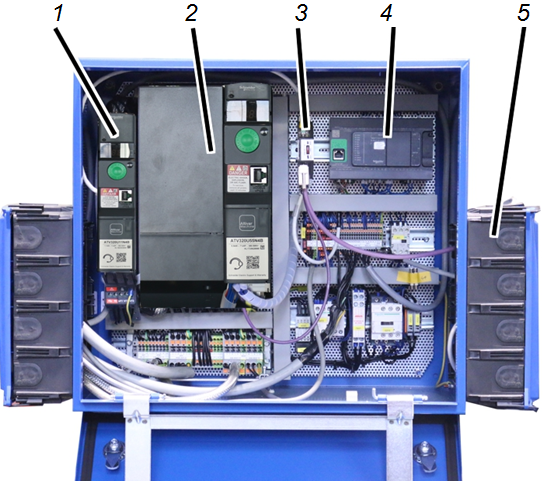
Gesamtansicht Katzsteuerung:
Je nach Kran ist die Katzsteuerung unterschiedlich aufgebaut. Zur Orientierung kann das folgende Bild genutzt werden.
|
|
─ 1: Frequenzumrichter Katzfahrantrieb
─ 2: Frequenzumrichter Hubwerk
─ 3: CAN-Verteiler
─ 4: SPS
─ 5: Flanschgehäuse
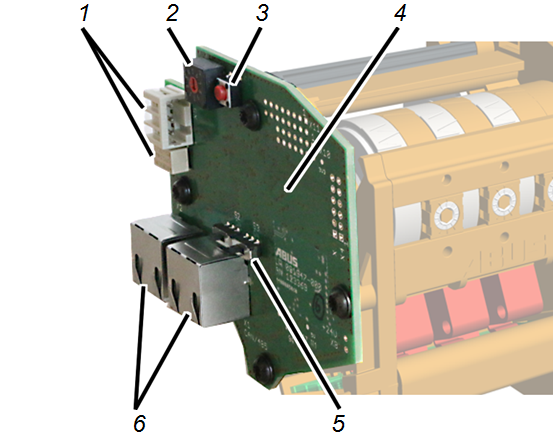
Absolutwert-Drehgeber ‚AWG‘ (am Getriebegrenzschalter ‚GGS‘):
|
|
─ 1: Relais und Stiftleiste für zusätzliche Schaltaufgaben (Option)
─ 2: Einstellrad für Geräteadresse (Option)
─ 3: Taster zum Rücksetzen der Geräteadresse
─ 4: Platine
─ 5: Schalter für Abschlusswiderstand
─ 6: Anschluss für CAN-Bus-Netzwerk und Modbus-Netzwerk
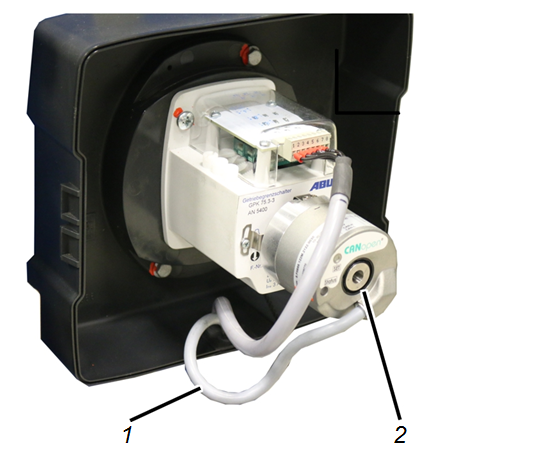
Absolutwert-Drehgeber ‚Kübler‘ (am Getriebegrenzschalter ‚GPK‘):
|
|
─ 1: CAN-Bus-Leitung
─ 2: Absolutwert-Drehgeber ‚Kübler‘